





























Parameters 153
Defines the pre-magnetization time when
• parameter
is set to
(in
vector motor control mode), or
• parameter
is set to
(in scalar motor control mode).
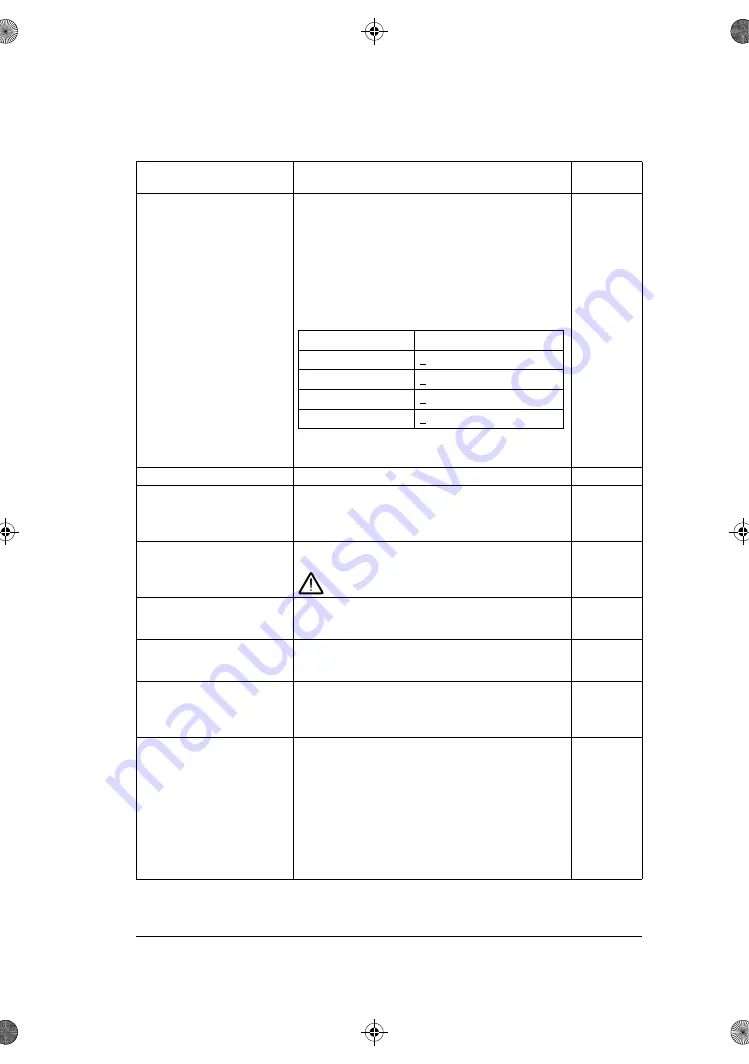
After the start command, the drive automatically
premagnetizes the motor for the set time. To ensure full
magnetizing, set this parameter to the same value as, or
higher than, the rotor time constant. If not known, use the
rule-of-thumb value given in the table below:
Note:
This parameter cannot be changed while the drive
is running.
500 ms
0…10000 ms
Constant DC magnetizing time.
1 = 1 ms
Selects the way the motor is stopped when a stop
command is received.
Additional braking is possible by selecting flux braking
(see parameter
).
Ramp
Coast
Stop by switching off the output semiconductors of the
drive. The motor coasts to a stop.
WARNING!
If a mechanical brake is used, make
sure it is safe to stop the drive by coasting.
0
Ramp
Stop along the active deceleration ramp. See parameter
group
1
Torque limit
Stop according to torque limits (parameters
). This mode is only possible in vector motor control
mode.
2
Selects the way the motor is stopped when an emergency
stop command is received.
The source of the emergency stop signal is selected by
parameter
.
Ramp stop (Off1)
With the drive running:
• 1 = Normal operation.
• 0 = Normal stop along the standard deceleration ramp
defined for the particular reference type (see section
on page
). After the drive has
stopped, it can be restarted by removing the
emergency stop signal and switching the start signal
from 0 to 1.
With the drive stopped:
• 1 = Starting allowed.
• 0 = Starting not allowed.
0
No.
Name/Value
Description
Default
FbEq 16
Motor rated power
Constant magnetizing time
< 1 kW
> 50 to 100 ms
1 to 10 kW
> 100 to 200 ms
10 to 200 kW
> 200 to 1000 ms
200 to 1000 kW
> 1000 to 2000 ms
ACS180 FW.book Page 153 Tuesday, March 9, 2021 2:25 PM