Actual signals and parameters
184
23.04
ACC
COMPENSATION
Defines the derivation time for acceleration/(deceleration) compensation. In
order to compensate inertia during acceleration a derivative of the reference is
added to the output of the speed controller. The principle of a derivative action
is described for parameter
Note:
As a general rule, set this parameter to the value between 50 … 100% of
the sum of the mechanical time constants of the motor and the driven machine.
(The speed controller Autotune Run does this automatically, see parameter
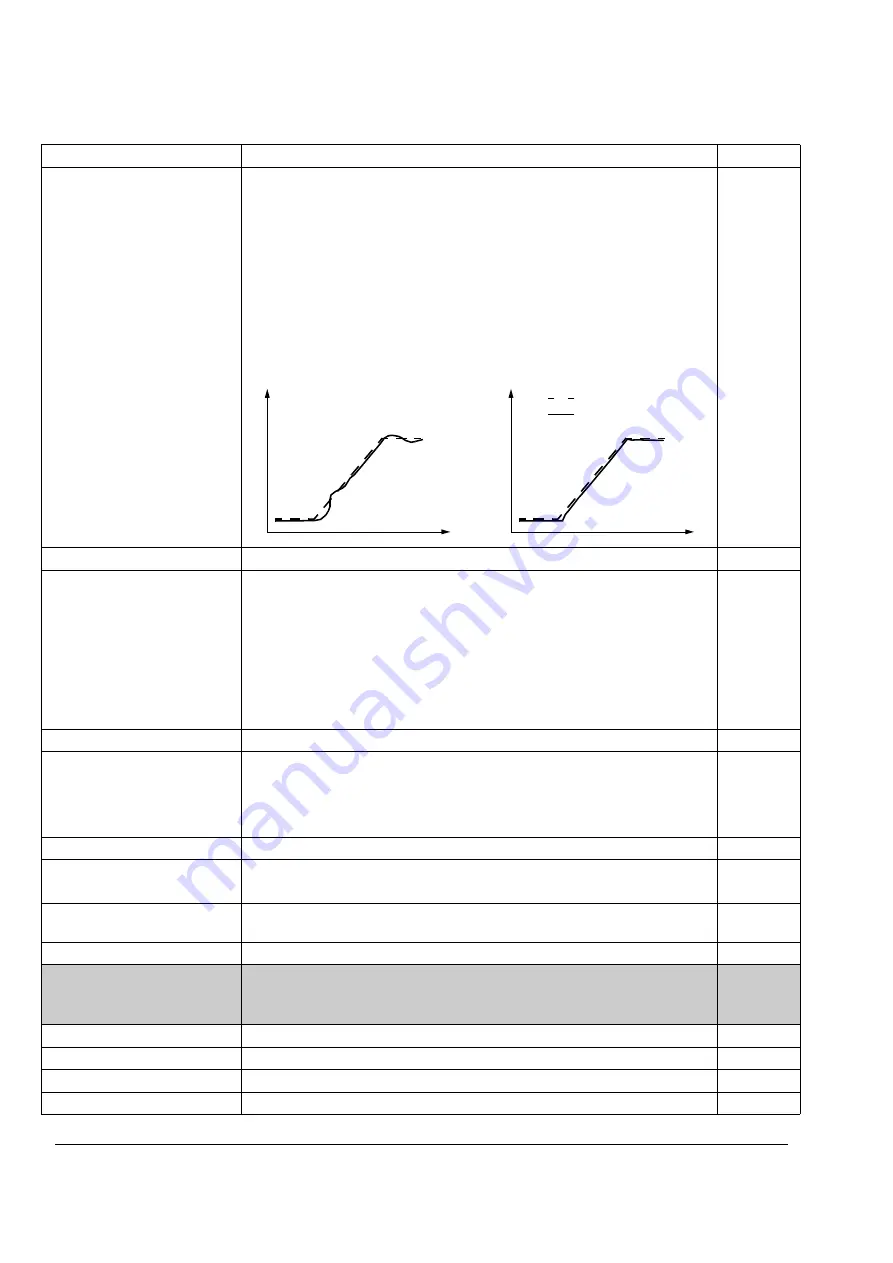
The figure below shows the speed responses when a high inertia load is
accelerated along a ramp.
0.00 … 999.98 s
Derivation time
0 … 9999
23.05
SLIP GAIN
Defines the slip gain for the motor slip compensation control. 100% means full
slip compensation; 0% means no slip compensation. The default value is
100%. Other values can be used if a static speed error is detected despite of
the full slip compensation.
Example:
1000 rpm constant speed reference is given to the drive. Despite of
the full slip compensation (SLIP GAIN = 100%), a manual tachometer
measurement from the motor axis gives a speed value of 998 rpm. The static
speed error is 1000 rpm - 998 rpm = 2 rpm. To compensate the error, the slip
gain should be increased. At the 106% gain value, no static speed error exists.
0.0 … 400.0%
Slip gain value.
0 … 400
23.06
AUTOTUNE RUN
Start automatic tuning of the speed controller. Instructions:
- Run the motor at a constant speed of 20 to 40% of the rated speed.
- Change the auto tuning parameter
Note:
The motor load must be connected to the motor.
NO
No auto tuning.
0
YES
Activates the speed controller auto tuning. Automatically reverts to NO.
65535
23.07
SP ACT FILT TIME
Defines the time constant of the actual speed filter, that is time within the actual
speed has reached 63% of the nominal speed.
0...1000000 ms
Time constant
1 = 1 ms
24 TORQUE CTRL
Torque control variables.
Visible only if Master/Follower is Active (parameter
and parameter
= DTC.
24.01
TORQ RAMP UP
Defines the torque reference ramp up time.
0.00 … 120.00 s
Time for the reference to increase from zero to the nominal motor torque.
0 … 12000
24.02
TORQ RAMP DOWN Defines the torque reference ramp down time.
0.00 … 120.00 s
Time for the reference to decrease from the nominal motor torque to zero.
0 … 12000
Index
Name/Selection
Description
FbEq
Speed reference
Actual speed
No Acceleration Compensation
Acceleration Compensation
t
t
%
%
Содержание ACS 800 Series
Страница 1: ...ACS800 Firmware Manual Crane Control Program N697 ...
Страница 4: ......
Страница 26: ...Start up and control through the I O interface 26 ...
Страница 36: ...Quick start up guide 36 ...
Страница 52: ...Control panel 52 ...
Страница 105: ...Program features 105 Figure Control diagram for Shaft synchronisation executed in 20 ms ...
Страница 126: ...Program features 126 The figures below show speed limits according to different load conditions ...
Страница 128: ...Program features 128 ...
Страница 150: ...Application macros control location EXT1 EXT2 150 ...
Страница 228: ...Actual signals and parameters 228 ...
Страница 299: ...Adaptive Programming examples for crane control 299 ...
Страница 305: ...Adaptive Programming examples for crane control 305 ...
Страница 312: ...Adaptive Programming examples for crane control 312 The following figures show the previous example enlarged ...
Страница 314: ...Adaptive Programming examples for crane control 314 The following figures show the previous example enlarged ...
Страница 318: ...Analogue Extension Module 318 ...
Страница 332: ...Additional data actual signals and parameters 332 ...
Страница 333: ...DriveWindow 333 DriveWindow DriveWindow connected to the ACS800 RMIO RDCO board and channel CH3 ...
Страница 334: ...DriveWindow 334 ...
Страница 335: ...Control block diagrams 335 Control block diagrams ...
Страница 336: ...Control block diagrams 336 ...
Страница 337: ...Control block diagrams 337 ...
Страница 338: ...Control block diagrams 338 ...
Страница 340: ...www abb com drives www abb com drivespartners Contact us 3AFE68775230 Rev E EN 2012 09 25 ...