



























Manual Stair Robot SR1750 HE
Publication: 29-07-04
AATA INTERNATIONAL B.V.
5.2. Loading
5.2.1 The correct position of the load
•
If the load is not placed in the correct position on the lifting
platform, the Stair robot can get instable during the process of
climbing or descending a staircase. This can cause the robot to
fall down the stairs resulting in serious damage and injuries.
•
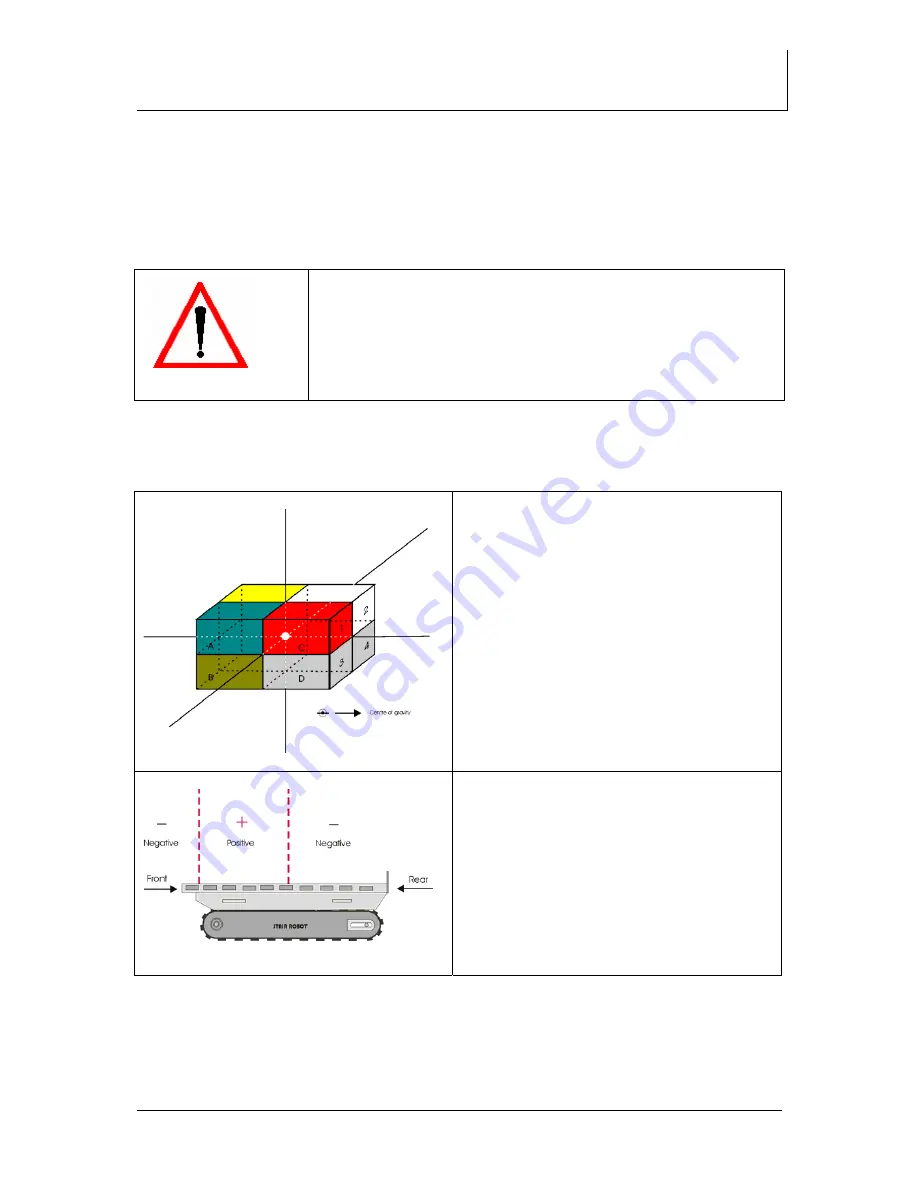
The objective is to create an optimal centre of gravity position for the loaded stairrobot
considering the ‘weight distribution’ of the load
•
Before positioning the load on the
lifting platform the centre of gravity of
the load has to be determined
•
Position the load on the platform with
the centre of gravity of the load end
forward (in positive area)
•
Position the load with the centre of
gravity of the load as low as possible
to the lifting platform.
Page 15 of 28
Содержание SR1750 HE
Страница 1: ...Manual Stair Robot SR1750 HE AATA INTERNATIONAL B V Manual Stair Robot SR1750 HE ...
Страница 24: ...Manual Stair Robot SR1750 HE Publication 29 07 04 AATA INTERNATIONAL B V 8 Electrical system Page 24 of 28 ...
Страница 25: ...Manual Stair Robot SR1750 HE Publication 29 07 04 AATA INTERNATIONAL B V 9 Hydraulic system Page 25 of 28 ...
Страница 26: ...Manual Stair Robot SR1750 HE Publication 29 07 04 AATA INTERNATIONAL B V 10 Parts Page 26 of 28 ...





















































