





























Page 18 H0 Sound Decoder MX640
*
Set the loco on the track, with the proper travel direction selected, about 1 to 2 meters before the
start marker and the function F0 (headlights)
turned off.
Acceleration times (momentum in CV #3
of the decoder as well as settings in the cab) should be set to 0 or a small value to prevent any
speed changes inside the calibration distance. Otherwise, the length of track before the calibration
marker needs to be increased accordingly.
* The calibration mode is now activated by programming
CV #135 = 1
(operational mode program-
ming). This is a pseudo-programming because the value of 1 does not replace the value already
stored in CV #135.
* Move the speed regulator to a
medium speed
position (1/3 to ½ of full speed); the loco acceler-
ates towards the start marker.
* When the engine passes the
start marker,
turn on
the function
F0
(headlights);
turn F0 off
again when passing by the
end marker.
This ends the calibration run and the loco may be stopped.
* CV #136 can now be read out for checking purposes. The calibration “result” stored in that CV
doesn’t mean very much by itself. If however, several calibration runs are performed, the value in
CV #136 should approximately be the same every time, even if the traveling speed is varied.
Km/h speed regulation in operation:
CV #135
defines whether the “normal” or km/h operating mode is in use:
CV #135 = 0: The engine is controlled in “normal” mode; a possible km/h calibration run performed
earlier has no effect but the calibration results remain stored in CV #136.
CV #135 = 10: each speed step (1 to 126) becomes 1 km/h: that is step 1 = 1 km/h,
step2 = 2 km/h, step 3 = 3 km/h ... to step 126 = 126 km/h
CV #135 = 5: each speed step (1 to 126) becomes 1/2 km/h: that is step 1 = .5 km/h,
step 2 = 1 km/h, step 3 = 1.5 km/h, ... to step 126 = 63 km/h (for local or
narrow gauge railways!)
CV #135 = 20: each speed step (1 to 126) becomes 2 km/h: that is step 1 = 2 km/h, step 2 =
4 km/h, step 3 = 6 km/h, .to step 126 = 252 km/h (High speed trains!)
The speed regulation in km/h is not just useful for direct cab control, but also in speed limits through
the “signal controlled speed influence” (CV’s 51 – 55). The values entered to those CV’s are also
being interpreted in km/h.
Mph speed regulation:
A mph speed regulation can be achieved by extending the calibration distance accordingly!
Settings for the
ZIMO ”signal controlled speed influence“
(HLU)
ZIMO digital systems offer a second level of communication for transmitting data from the track sec-
tions to engines that are in such sections. The most common application for this is the “signal con-
trolled speed influence”, that is the stopping of trains and applying of speed limits in 5 stages issued
to the track sections as required with the help of MX9 track section modules or its successors. See
ZIMO flyers at
and MX9 instruction manual.
The term
“HLU” method
was coined over the years after the speed limit designation “H” (=Halt or
stop), “L” (=Low speed) and “U” (Ultra low speed).
* If the “signal controlled speed influence” is being used (only possible within a ZIMO system), the
speed limits “U” and “L” (and the intermediate steps if need be) can be set with configuration vari-
ables #51 to #55 as well as acceleration and deceleration values (momentum) with CV #49 and #50
(see CV table).
Please note that the signal controlled acceleration and deceleration times are always
added
to the
times and curves programmed to CV #3, 4, 121, 122 etc. Signal controlled accelerations and decel-
erations compared to cab controlled momentum can therefore progress either at the same rate (if
CV #49 and #50 is not used) or slower (if CV #49 and/or #50 contain a value of >0), but never
faster.
It is of utmost importance for a flawlessly working train control system using the signal controlled
speed influence that the stop and related brake sections are arranged properly everywhere on the
layout, especially in terms of their length and consistency. Please consult the MX9 instruction man-
ual and the STP manual.
The braking characteristics should be set up on a suitable test track so that all locos come to a
complete stop within about 2/3 of the stop section, which is in HO typically about 15 to 20 cm before
the end of a stop section (deceleration rate adjusted with CV #4 and CV #50 as well as the reduced
speed with CV #52 for “U”). Setting the loco up to stop precisely within the last centimeter of a stop
section is not recommended because such an exact stop point is, for various reasons, hardly re-
peatable every time.
Settings for stopping with
”asymmetrical DCC signal“ (Lenz ABC)
The “asymmetrical DCC signal” is an alternative method for stopping trains at a “red” signal, for ex-
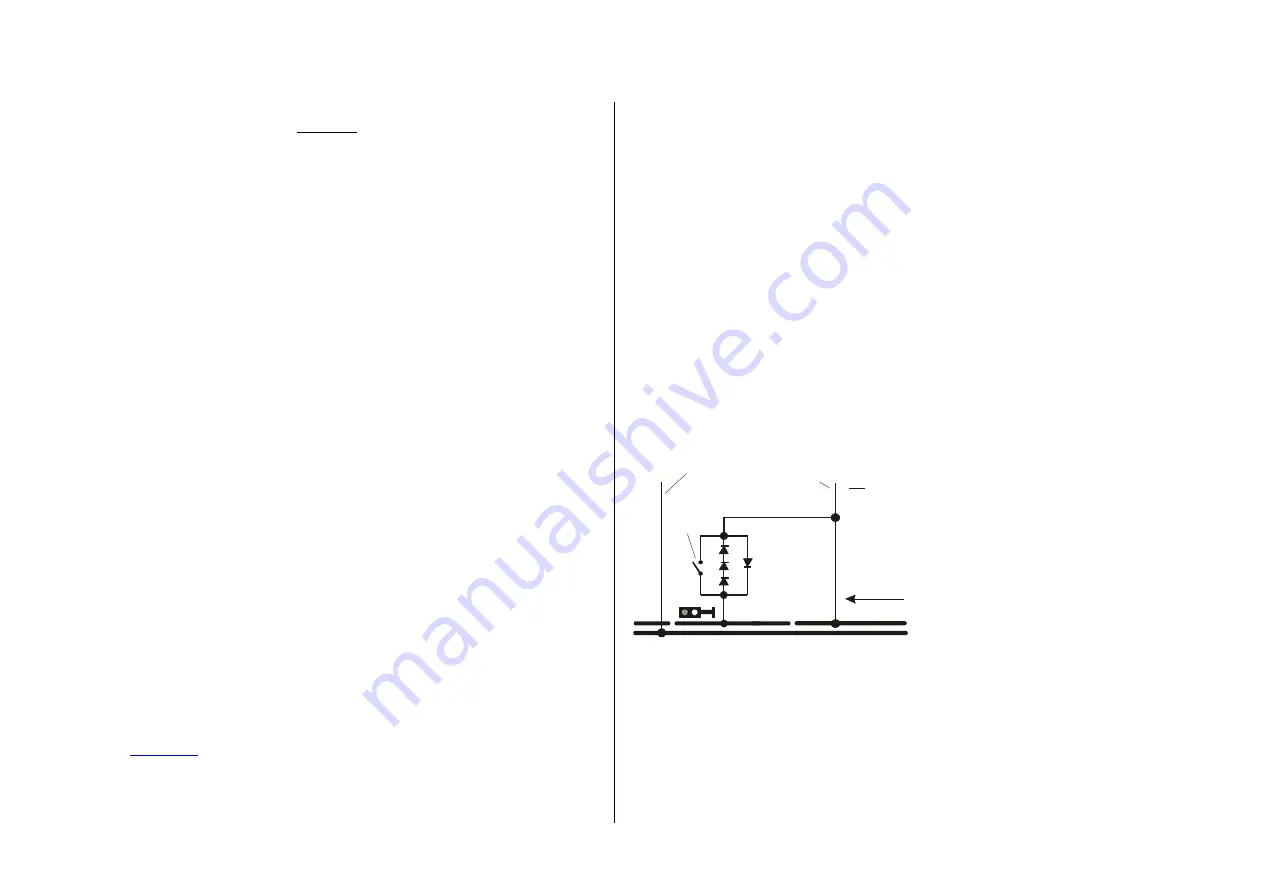
ample. All that is required is a simple circuit made up of 4 or 5 commercially available diodes.
Normally, 3 diodes in series (4 when us-
ing Schottky diodes) and one in opposite
direction in parallel is the usual arrange-
ment for a stop section.
The different voltage drops across the di-
odes results in an asymmetry of about 1
to 2V. The direction in which the diodes
are mounted determines the polarity of
the asymmetry and with it the driving di-
rection a signal stop is initiated.
The asymmetrical DCC signal stop mode
needs to be activated in the decoder with
CV #27. Normally bit 0 is set, that is CV
#27 = 1, which results in the same directional control as the “Gold” decoder from Lenz.
H
alt (stop) section
Track power from
command station
Silicium diodes,
for example
1N5400x
(3 A - Typen)
Travel direction
Switch to
cancel stops
when signal
tunrs green.
Note
3 diodes in series is the
minimum number of diodes
required to stop ZIMO
decoders. 4 or more diodes
are needed for decoders
from other manufacturers!
Because the diodes cause
an unwanted voltage drop,
use the minimum number
of diodes depending on
decoder type.
Red
The asymmetrical threshold can be modified with CV #134 if necessary, default is 0.4V. At the time
of writing, the “asymmetrical DCC signal” has not been standardized and many DCC systems pay
no attention to this feature!







































































