





























10.1 Specifications of Robot Interface Signals
10-1
HW0480311
HW0480311
10
Robot Interface Signals
10.1
Specifications of Robot Interface Signals
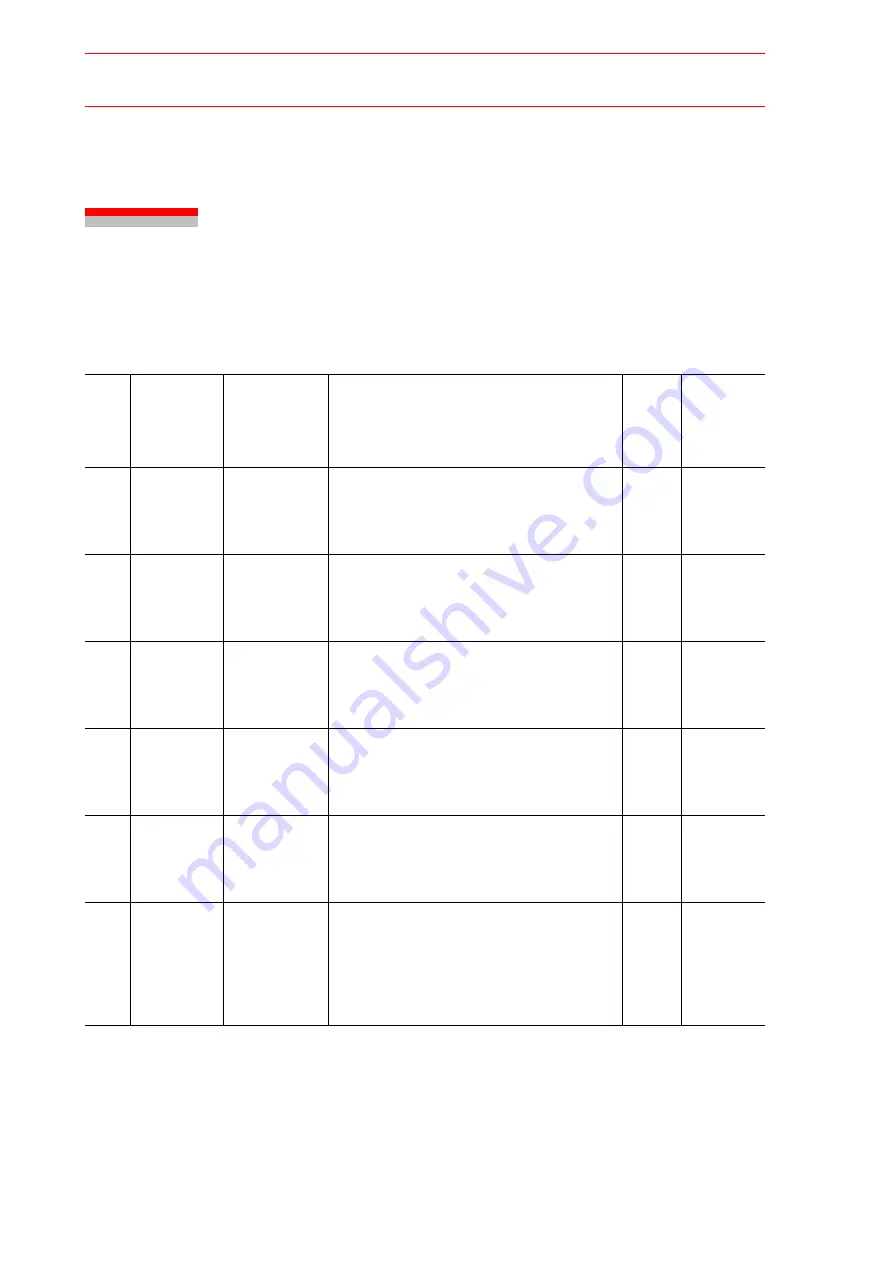
The following table shows the correspondence of the pin number and the signal of connector
CON3 (26 pins).
For signal systems, refer to
“
11. Conncetion System Diagram.
”
No.
Pin No.
Correspon
ding to
Connector
Signal
Meaning
Function
Direct
ion
*1
Signal
Form
1
A
- B
(0V side)
Arc voltage
adjustment
instruction
Gives the compensation value of the arc
voltage when set to
"
Synergic.
"
(When set to
"
independent,
"
the arc volt-
age is sent directly.)
R
→
W
Analog
voltage
input of
0V to 14V
2
C
- D
(0V side)
Welding cur-
rent instruc-
tion
Gives the set value of the output current
(wire feeding amount) for the welding
source.
R
→
W
Analog
voltage
input of
0V to 14V
3
F
- G
Wire inching
instruction
Performs the wire inching.
R
→
W
Contact
input
(Valid at
closed)
4
H
- J
Wire retract
instruction
Withdraws the wire.
R
→
W
Contact
input
(Valid at
closed)
5
K
- L
ARCON/
ARCOF
instruction
Instructions to start/stop the welding.
R
→
W
Contact
input
(Valid at
closed)
6
M
- N
("-" side)
Wire stick
detection
Sends the output terminal voltage of the
welding source.
The wire stick detection voltage
(approx.15 V) is input from the robot side.
W
→
R
Welding
source
output
voltage
(Analog
value)
80/129







































































