





























7.5 Encoder Divided Pulse Output
7.5.1 Encoder Divided Pulse Output Signals
7-18
7.5
Encoder Divided Pulse Output
The encoder divided pulse output is a signal that is output from the encoder and processed
inside the SERVOPACK. It is then output externally in the form of two phase pulse signals
(phases A and B) with a 90
°
phase differential. At the host controller, it is used as the position
feedback.
The following table describes the signals and output phase forms.
7.5.1
Encoder Divided Pulse Output Signals
*
Refer to the following section for information on the origin within one encoder rotation.
Relation between Renishaw PLC Incremental Linear Encoders and Encoder Output Pulse Signal from the
SERVOPACK When Using a RGS20 Scale and RGH22B Sensor Head
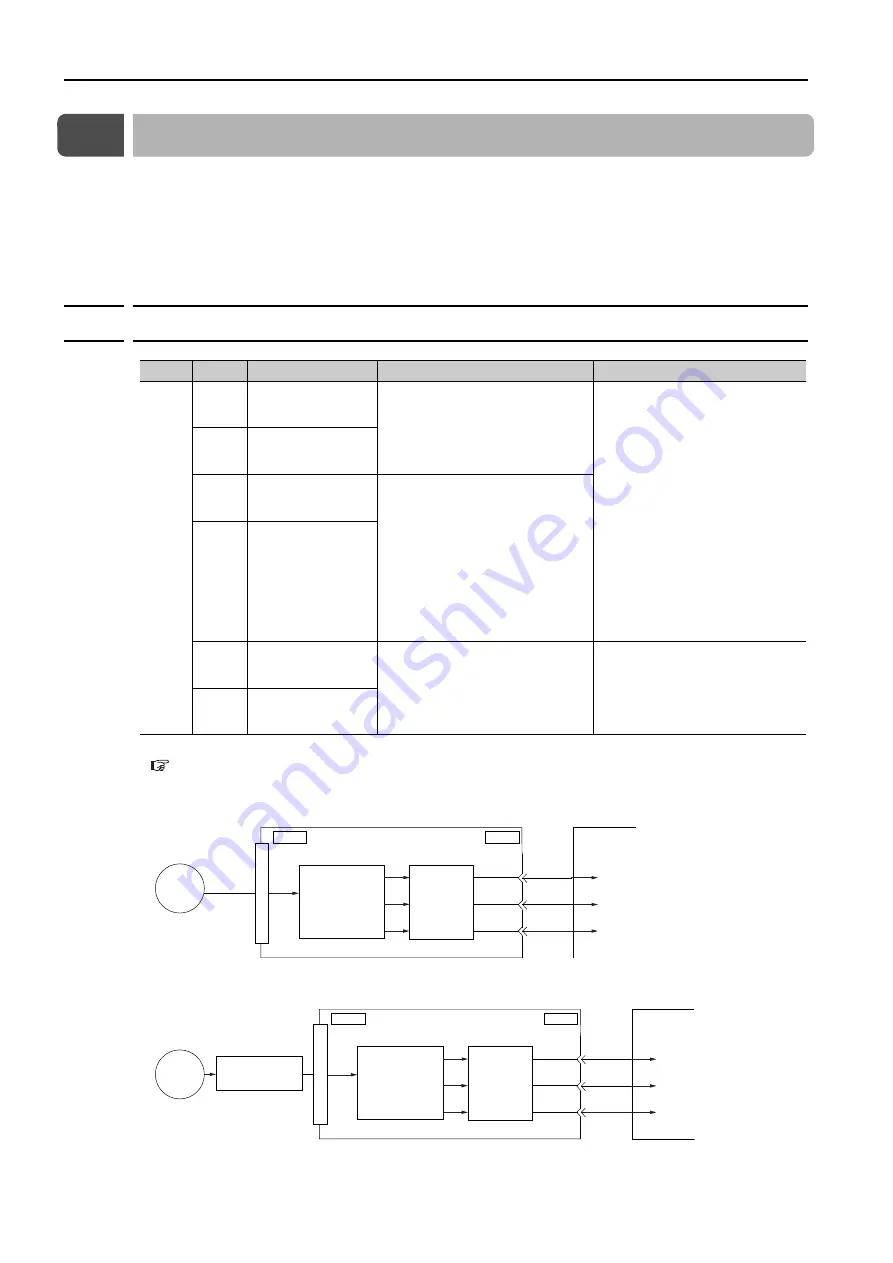
•
Rotary Servomotor
•
Linear Servomotors
Type
Signal
Connector Pin No.
Name
Remarks
Output
PAO
CN1-17
Encoder Divided Pulse Output,
Phase A
•
Rotary Servomotors
These encoder divided pulse
output pins output the number
of pulses per motor resolution
that is set in Pn212 (Number of
Encoder Output Pulses). The
phase difference between
phase A and phase B is an
electric angle of 90
°
.
•
Linear Servomotors
These encoder divided pulse
output pins output pulses at the
resolution that is set in Pn281
(Encoder Output Resolution).
The phase difference between
phase A and phase B is an
electric angle of 90°.
/PAO
CN1-18
PBO
CN1-19
Encoder Divided Pulse Output,
Phase B
/PBO
CN1-20
PCO
CN1-21
Encoder Divided Pulse Output,
Phase C
*
These pins output one pulse
every motor rotation.
/PCO
CN1-22
ENC
CN1
CN2
PAO
PBO
PCO
(Pn212)
SERVOPACK
Host controller
Serial
data
Conversion of
serial data to
pulses
Dividing
circuit
ENC
CN1
CN2
PAO
PBO
PCO
(Pn281)
Linear
encoder
Serial data
Serial
Converter Unit
SERVOPACK
Conversion of
serial data to
pulses
Dividing
circuit
Host controller







































































