

























B-10
166006-1CD
166006-1CD
Appendix B
B.1 Illustrated Parts List
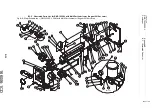
RM2-755/1255SL
Positioner
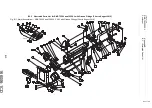
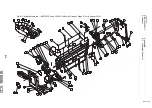
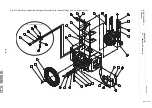
Table B
-
3: Main Drive Headstock Swing Arm Assembly with Grease Fittings
ITEM NO.
RM2-755SL,
PART NO.
RM2-1255SL,
PART NO.
DESCRIPTION
755
Qty
1255
Qty
163896-1
163897-1
MAIN DRIVE HEADSTOCK
SWING ARM ASSEMBLY
1
163834-1
163834-2
HOUSING, HEADSTOCK
SWINGARM
1
2
140786-3
BEARING.SLEWING,EXTERNAL
GEAR,M3XHD/MR300,HARDENED
1
3
132049-1
WASHER, CONICAL SPRING,
GTS16
23
4
130532-24
SCREW, SHC, M12 X 55,CLASS
12.9
23
5
na
164817-1
BLOCK, STOP, MAIN DRIVE
SWINGARM
2
6
na
152712-1
WASHER, BELLEVILLE, .505" ID X
1" OD
32
9
na
164816-1
PIN, DOWEL, M20 X 50 m6,
HARDEN STL
4
10
471075-1
WASHER, CONICAL SPRING, M12
1
9
11
na
472303-10
SCREW, SHC, M12 X 55,CLASS
12.9
8
12
na
137298-7
SCREW, SHOULDER, 1/2” X 3" LG
X 3/8”-16 THD
2
13
na
130441-7
NUT, HEX, 3/8
2
15
132652-9
PIN, DOWEL,M20X40
2
16
165175-1
SHIM, 0.0100", MAIN DRIVE MTG
1
17
165175-2
SHIM, 0.0050", MAIN DRIVE MTG
1
18
163888-1
163889-1
DRIVE ASSY, MAIN SWEEP AXIS
1
19
147177-1
WASHER, CONICAL SPRING, M20
8
20
130533-19
SCREW, SHC, M20x2.5 X 220,
CLASS 12.9
2
21
130533-18
SCREW, SHC, M20x2.5 X 100,
CLASS 12.9
6
22
166337-1
166338-1
COVER, GEAR, HEADSTOCK
SWINGARM
1
23
130425-3
SCREW,BHSC,M6 X 12
7
24
148102-4
SCREW_SHC_M6X16_JIS
0209_W/CAPTIVE LOCK &
FLAT_BLACK
2
25
166341-1
166342-1
WIPER, RUBBER, HEADSTOCK
SWINGARM
1
26
167753-1
167754-1
LUBRICATOR ASSY, MAIN DRIVE,
RM2-1255/1555/2355
1
29
470602-1
WASHER, CONICAL, SPRING,
GTS6, YS
3
30
179842-1
MOUNT,GREASE TAB
1
90 of 145


























































