






















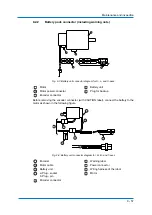




Internal cables and compressed air lines
8
-
45
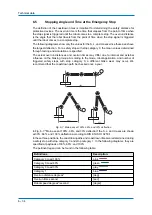
Fig. 8-3: Detailed drawing of connector
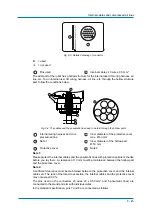
The wrist part of the robot has a hollow structure for the internal user I/O wiring harness, air
line, etc. To run internal user I/O wiring harness, air line, etc. through the hollow structure
part, follow the conditions below.
Fig. 8-4: The cables and the pneumatic line need to be laid through the hollow parts
Note 1:
Please protect the internal cables and the pneumatic lines with protection spirals or the like
before you lay them. A clearance of 10 mm must be maintained between the hollow part
and the protective cover.
Note 2:
A sufficient clearance must be maintained between the protective cover and the internal
cables etc. The ratio of the total-cross section, the internal cables and the protective cover
may not exceed 30 %.
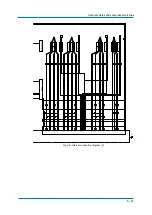
The pins used on the connectors 23 wires 23 x 0.50 mm² and 5 pneumatic lines) are
connected to the stand and arm with individual wires.
In the standard specification, pins 7 and 8 are connected as follows:
= used
= not used
Pins used
Internal cables: 23 wires, 0.5 mm²
Internal wiring harness and com-
pressed-air line
Inner diameter of the protective cover
max. Ø 43 mm
Note 1
Inner diameter of the hollow part
Ø 53 mm
Protective cover
Note 2
8
4
9
6
5
1
7
2
3
14
19 20
15
17
11 12
18
13
21 22 23
10
16
P
P
P
P
P
P
P
P
P
P
P
1
6
5
3
4
2
7
8
9
10
15
14
13
12
11
20
19
17
18
16
22
23
21
2
1
1
2
1
3
4
5
6
2
1
4
2
5
3
6
Summary of Contents for MPL160-J00
Page 1: ...ROBOTICS MPL160 J00 YR MPL0160 J00 Operating and Maintenance Manual...
Page 36: ...Technical data 6 36 6 5 1 2 Stop position L axis 100 deflection deg deg s deg s sec...
Page 37: ...Technical data 6 37 6 5 1 3 Stop position U axis 100 deflection deg deg s deg s sec...
Page 61: ...Maintenance and inspection 9 61 Air outlet cap Joint 80 9 0 170 1 1 2 2 2 1 2...
Page 91: ...Parts lists 11 91...







































































