





























8-46
155507-1CD
RE-CSO-A037
DX100
8 Parameter
8.6 Parameters according to Coordinated or Synchronized Operation
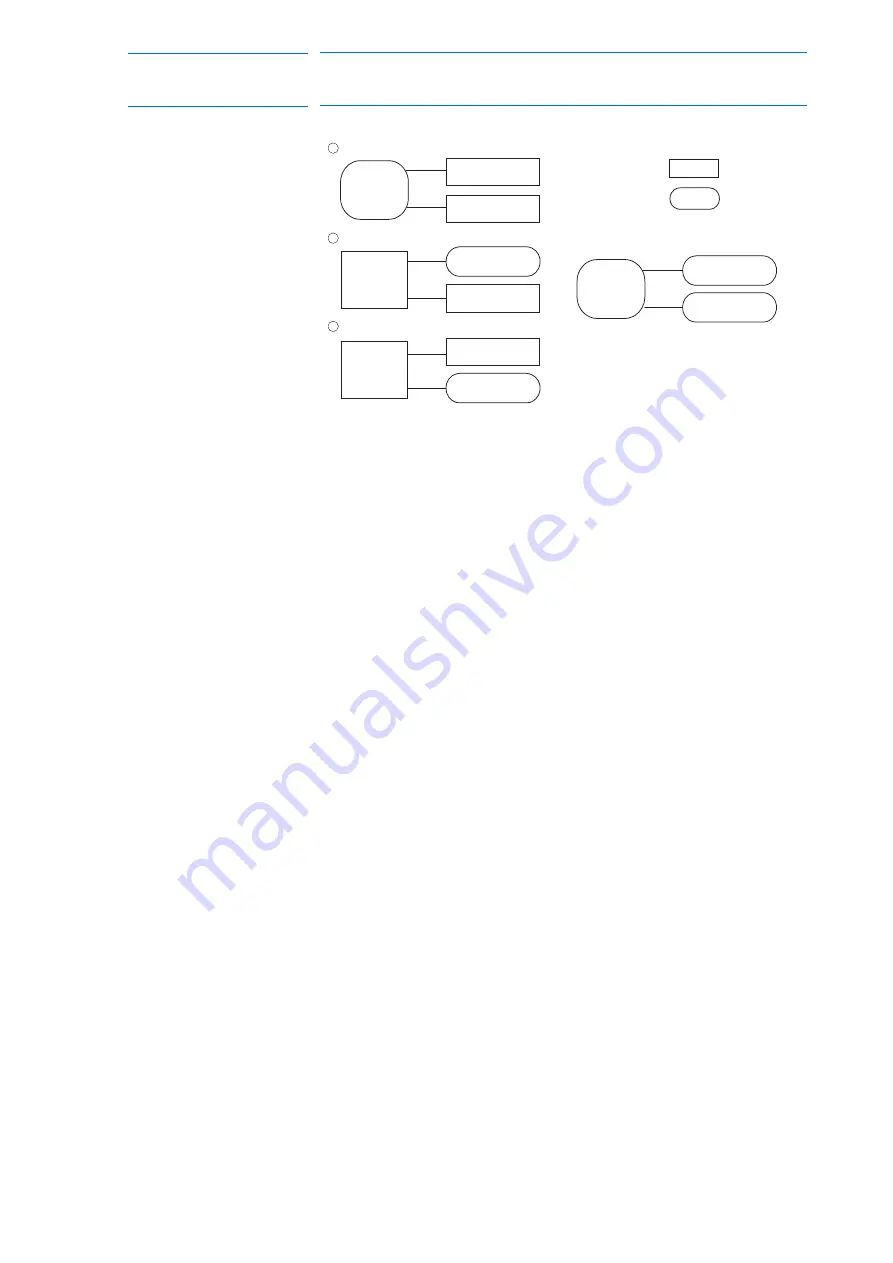
8.6.0.4 S2C232: JOB AT CALLING MASTER OF SUBTASK BY INDEPENDENT
CONTROL
This parameter specifies the job which is called up when the master of the
subtask is called up by independent control.
Master Job: Job registered in the master control window
Root Job: Job activated by PSTART instruction
8.6.0.5 S2C264: STATION AXIS CURRENT VALUE DISPLAY FUNCTION
This parameter specifies whether the function to display the current value
of the station axis in the following units is valid/invalid.
Rotary axis : Angle (deg)
Servo track : Distance (mm)
Regarding whether to specify the rotary axis or the servo track, refer to
section 8.6.0.6 “S2C265 to S2C288: STATION AXIS DISPLAYED UNIT”
.
8.6.0.6 S2C265
to
S2C288:
STATION AXIS DISPLAYED UNIT
This parameter specifies the station axis displayed unit (bit specification).
: Operating
0: One of the task jobs that are currently
displayed operates.
1: All task jobs operate.
Sub task 1
Master
task
Sub task 2
Master
task
Sub task 1
Sub task 2
: Not operating
Sub task 1
When master task is currently displayed:
1
When sub task 1 is currently displayed:
2
When sub task 2 is currently displayed:
3
Sub task 1
Sub task 2
Sub task 2
Sub task 1
Master
task
Master
task
0
: Master job
1
: Root job
0
: Invalid
1
: Valid
0
: Display angle (deg)
1
: Display in distance (mm)
477 of 554





















































