




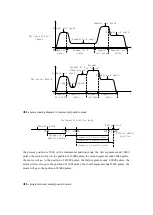
























Bundle the master axis no.1 motor and slave axis no.4 motor with MOSYN instruction, the slave
axis will follow the master axis with the speed 5000Hz and run 10000 pulses. The acceleration
and deceleration tiem is 50ms. The slave axis speed is 0.5 times of master axis.
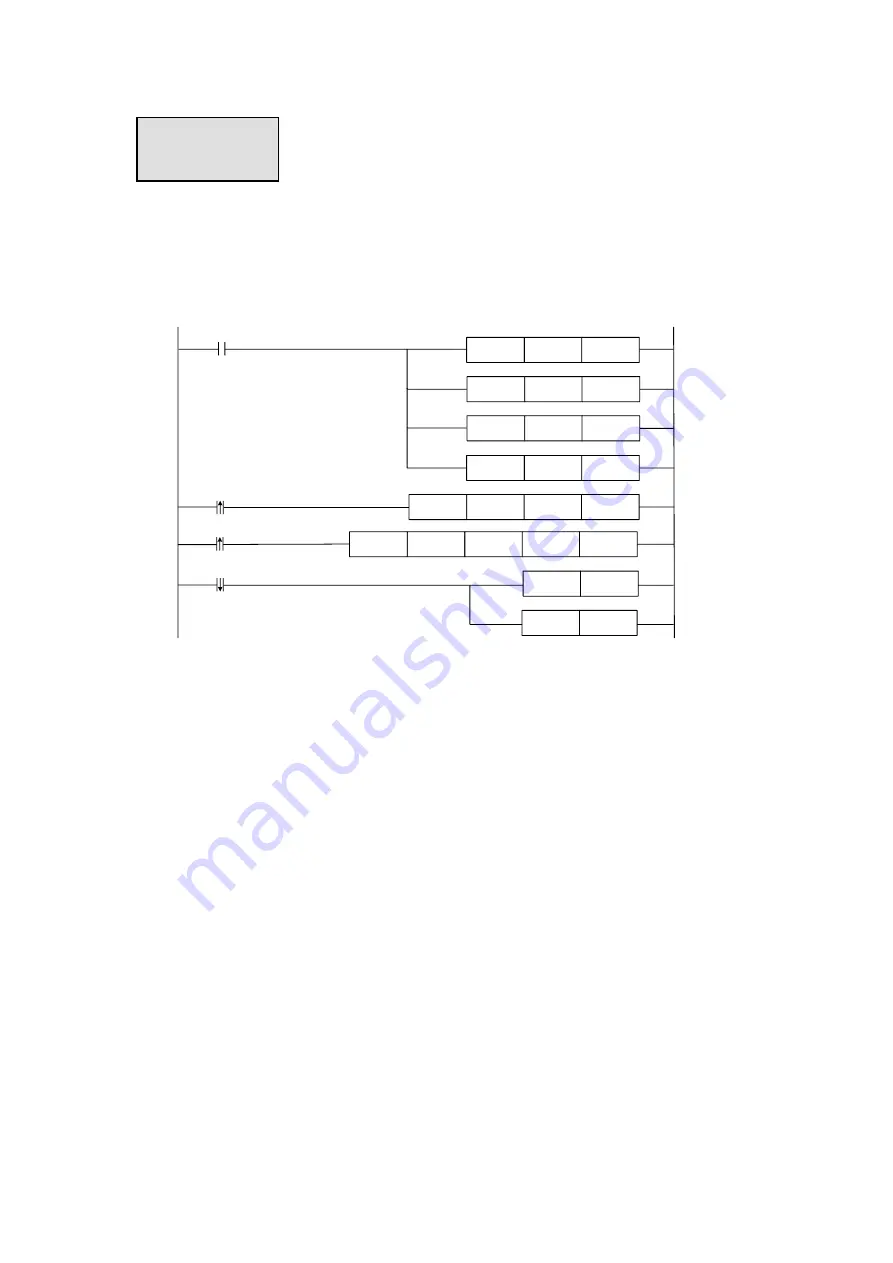
The ladder chart:
SM2
DMOV
K10000
HD10
DMOV
K5000
HD12
DMOV
K50
HD14
HD10
HD12
HD14
MOTO
K1
M0
M1
SM2001
RST
M0
RST
M1
MOSYN
HD0
K1
K4
EMOV
K0.5
HD0
The PLC starts running. When SM2 is ON, the pulse numbers, speed, acceleration and
deceleration time, synchronous speed times are stored in related registers.
Servo enabled, M0 is from OFF to ON, bundle the master axis and slave axis.
When M1 is from OFF to ON, PLC executes the instruction MOTO.
When the pulse sending completed, the running flag SM2001 reset, the related coils reset.
Application





















































