




























21
XciteRC Rocket 400 GPS
EN
Transmitter modes
Battery warning:
If the LED’s do blink and simultaneously an acoustic warning signal is to be heard the
model is to land instantly –
danger of falling!
Regard:
If the battery voltage drops to 10.2 – 10.4 V, the LED’s will slowly start to blink. From this moment on
you have approximately 1 to 2 minutes left to fly back the model or land safely. With the battery lifetime short
the blinking frequency becomes higher, meaning the LED’s will blink faster– instantly land!
If the battery is empty, the motors cannot be unlocked, the model can’t start. Exchange battery or recharge.
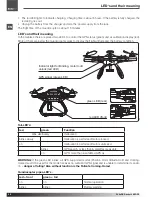
Transmitter modes
Regard:
To start, the switches have to be adjusted to position „normal“
Mode
Switch SWB (left)
Switch SWA (right) Transmitter-LED
Normal
0
0
red
Position Hold
0
1
blue
Flight Direction Locked
1
1
Altitude Hold
1
2
Coming Home
0
2
green
WARNING:
If the green LED blinks, all GPS-supported modes (Position-Hold, Altitude-Hold and Co-
ming-Home) mustn’t be used for the model receives no sufficient GPS-signal and is unable to determine its
position –
danger of falling! Also without function is the Failsafe Coming-Home!
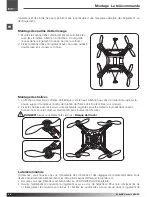
IMPORTANT:
before the first flight of the integrated magnetometer needs to be calibrated.
Proceed as follows:
• Turn on the Quadrocopter. The rear LED‘s flash alternately fast. Now switch on the transmitter.
• Bring the switches SWA and SWB in position 0.
• Place the Quadrocopter on a level surface and turn it at least eight times in a circle. Finally, the model
should stand in the same position as at the beginning.
• Move the switch SWA alternately for five seconds from position 0 to 1, ie 0
1
0
1
0
1 etc.
• Calibration is complete when the rear LEDs are lit continuously.
Flight modes
Normal:
Normal flight without GPS or altimeter control. If the mode is active the transmitter’s red LED is on.
Position Hold:
Fly to the favoured spot in a stable position and make sure the switches are adjusted cor-
rectly, then move the throttle lever to center position. The model remains in its position and automatically
performs correcting maneuvers.
Regard:
Depending on wind speed the model may need more or less room
for corrections. Only use this function if enough space is available – don’t fly too close to obstacles like trees
or exterior walls –
danger of collision!
Regard:
You can overcome this position by hand through strong throttle inputs.
If the mode is active, the blue LED of the transmitter is on, furthermore an acoustic beep signal is to be heard.
Coming Home:
Adjust the model’s nose towards the starting point and the switches into correct position to
activate the mode. If the model flies higher than 15 meters it will directly fly to the starting point at the current
height. If it flies lower, it will ascend to a 15 m height first for reasons of security, then fly back. Arrived over
the starting position (resp. the position in which the motors were unlocked) the model will pause at this height
a few seconds and slowly begins to descend.
Regard:
Bring the model to a stable hovering and the nose in the direction of the starting position, before
you activate the mode. Once landed the motors will be automatically locked (see paragraph Operation). To
start again, set switch SWA to 0 and unlock motors.
SWB
1
0
SWA Mode ON/OFF
SWB Mode ON/OFF
0
1
2
SWA


































































