





























Integral, sometimes called reset, provides additional action to the original proportional
response as long as the process variable remains away from the setpoint. Integral is a
function of the magnitude and duration of the deviation. In this analogy the reset
response would keep the car speed constant regardless of the terrain.
Derivative
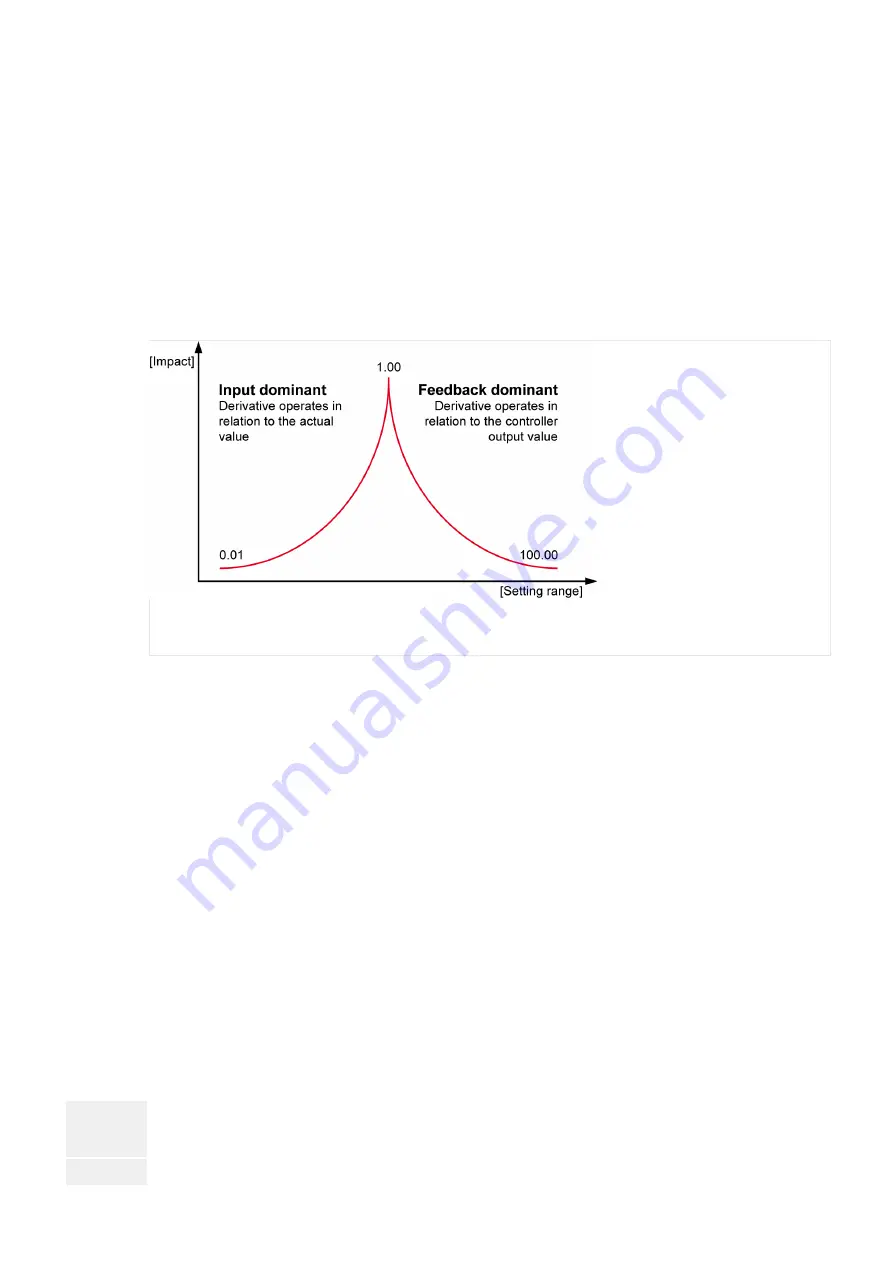
Derivative provides a temporary over-correction to compensate for long transfer lags and
reduce stabilization time on process upsets (momentary disturbances). The behavior of
the derivative parameter is shown in
.
• Analogy: Accelerating into high speed lane with merging traffic.
•
Fig. 160:
Behavior of the derivative parameter
Derivative, sometimes called "preact" of "rate", is very difficult to draw an accurate
analogy to, because the action takes place only when the process changes and is directly
related to the speed at which the process changes.
Merging into high speed traffic of a freeway from an "on" ramp is no easy task and
requires accelerated correction (temporary overcorrection) in both increasing and
decreasing directions. The application of brakes to fall behind the car in the first
continuous lane or passing gear to get ahead of the car in the first continuous lane is a
derivative action.
PID tuning example
If the system is unstable, make sure the governor is the cause. This can be checked by
closing the valve limiter until it has control of the actuator output. If the governor is
causing the oscillation, time the oscillation cycle time. A rule-of- thumb is, if the system’s
oscillation cycle time is less than 1 second, reduce the Proportional gain term. A rule-of-
thumb is, if the system’s oscillation cycle time is greater than 1 second, reduce the
Integral gain term (proportional gain may need to be increased also).
On an initial startup with the easYgen, all PID dynamic gain terms will require adjustment
to match the respective PID’s response to that of its control loop. There are multiple
dynamic tuning methods available that can be used with the easYgen’s PIDs to assist in
determining the gain terms that provide optimum control loop response times.
⚙
ᐳ
The following method can be used to achieve PID gain values that are close to optimum:
295
easYgen-3000XT Series
B37574
4 Configuration
4.4.4 Configure Controller
Released