





























40-
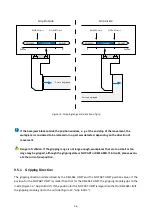
EN = 0, HOME = 0
CMD = 0
EN = 1, HOME = 0
CMD = 0
IDLE = 1 ?
no
ja
RELEASED = 1 ?
no
yes
Error acknowledged
Part released
Force-free
(motor
currentless)
Base Jaws
moving
9.10
Activating and Deactivating the Module (Setup Mode)
Especially while setting up the gripping process, it can be useful to deactivate the gripping module. The fin-
gers are then force-free, but the logic of the gripping module and the position detection are still active. In
this way, for example, gripping positions can be taught manually or workpieces can be removed manually.
The control sequences for the two states are shown in Figure 18.
Always observe the safety instructions when working directly on the gripping module.
Figure 17: Program sequence acknowledging an error and releasing a workpiece