




























Specialized Concentrated Focused
「
4
」
Installation
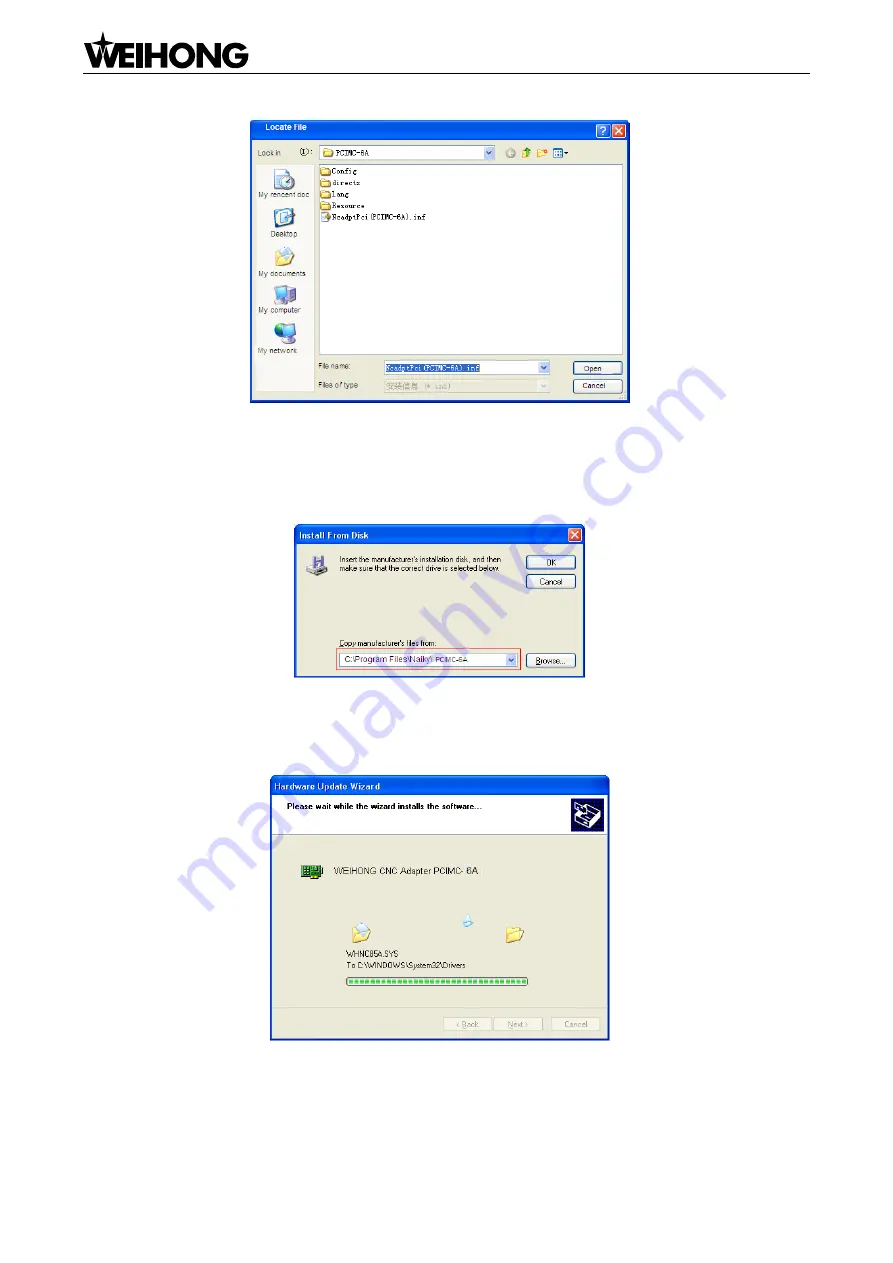
Fig. 2-5 Select the hardware driver
6) After hardware driver being correctly chosen, the interface jumps to the previous dialog box where
the target file directory will be displayed under item
“Copy manufacturer‟s files from:”, as shown in
Fig. 2-6 Target file directory confirmation
7) Click [OK] to go back, and then click [Next] to start updating the driver software. The progressing
picture is shown as Fig. 2-7.
Fig. 2-7 Updating the driver
8) When the updating is finished, a dialog as shown in Fig. 2-8 will pop up. Click [Finish] to complete
the update of the hardware driver.