







2
3
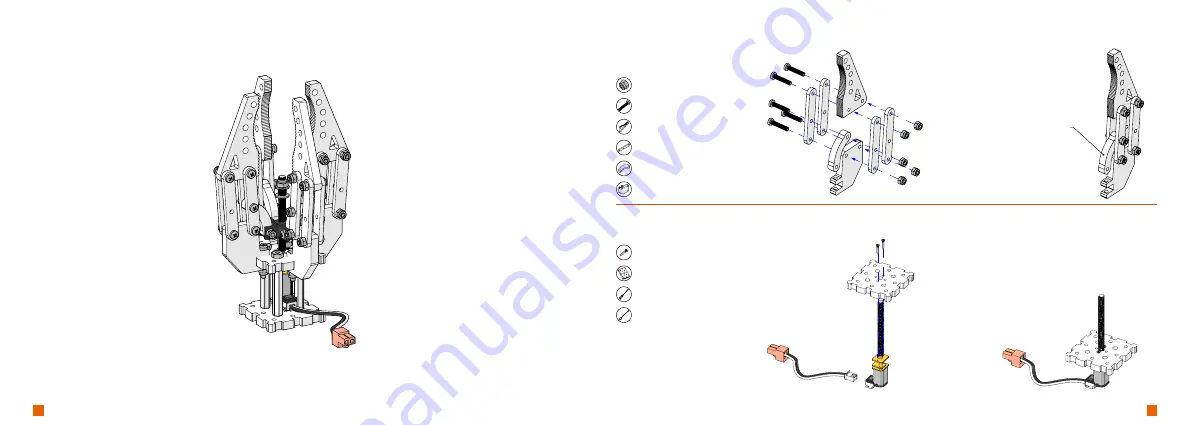
「 3 in 1 Robot Gripper—Four Cross Finger Gripper 」
「 3 in 1 Robot Gripper—Four Cross Finger Gripper」
5xNylon Locknut M3
5xScrew M3*16
1xForearm
4xHind Arm
1xTraction Arm
1xFixed Arm
2xScrew M1.6*8
1xN30 Motor Bracket
1xN30 DC Screw Motor
1xMotor Cord-35cm
▶ 01:Assemble the Gripper Finger
▶ 02:Install N30 Motor
→
→
Tips:
The direction of the
towing arm needs to be
installed as shown.
Note:
1. Please remove the protective paper on acrylic
before assemble.
2. Assemble the tow arm and pay attention to the
direction as shown.
3. Lock nylon locknut M3 as shown, do not screw
too tight in avoid of locking the finger joints. The
locknut should be attached to the acrylic, and the
screw can rotate freely.