





























SD710 Series Servo Drive User's Manual Chapter 12 Motion Control
12
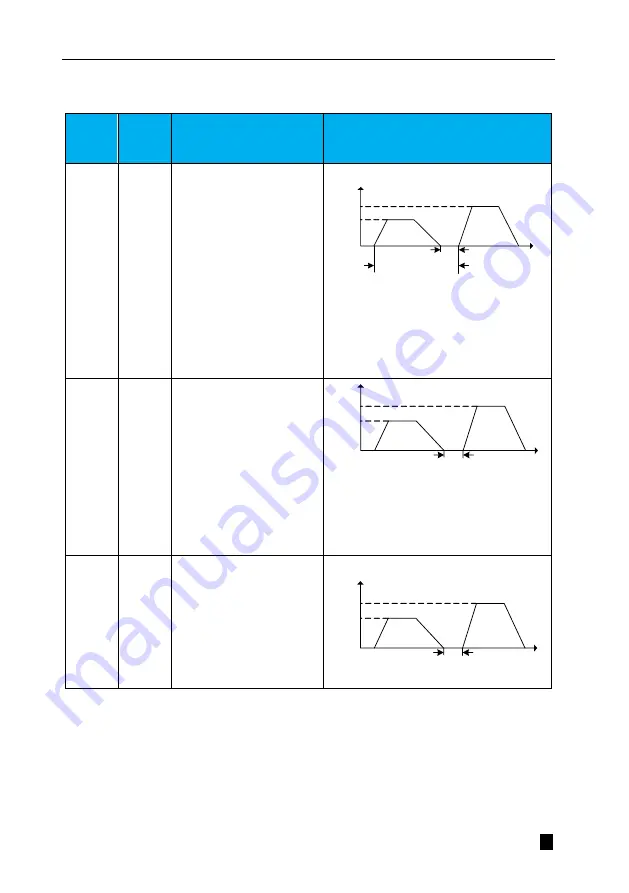
12.2.2 Internal multi-segment position operation mode
Table 12-2 Description of internal multi-segment position operation
Pn802.X
Setting
value
running
mode
note
Running waveform
0
single
segment
position
The segment number is
controlled by the communication
function code (Pn806) or the DI
terminal (CTRG and POS0 ~
POS3).
The next segment number can
be set when running at the
current segment number, and the
motor stops when it completes
the operation of current segment
command.
CTRG rising edge triggered
operation.
V
t
S
x
S
y
Delay
x
th
segment
y
th
segment
V
xmax
V
ymax
Set the time zone for y
th
V
xmax
and V
ymax
are the maximum operation speeds
(target speeds) for the x
th
and y
th
segments,
respectively.
S
x
and S
y
are the x
th
and y
th
segment
displacements , respectively.
1
Single-
time
multi-
segment
position
Automatic incremental switching
between segment numbers, a
settable delay between
segments, the motor stops after
1 round operation.
CTRG is active at high level and
stops at low level.
V
t
S
1
S
2
Delay
Segment 1
Segment 2
V
1max
V
2max
V
1max
and V
2max
are the maximum operation speeds
(target speeds) for Segment 1 and Segment 2,
respectively.
S
1
and S
2
are the segment 1 and segment 2
displacements, respectively.
2
Cyclic
multi-
segment
position
Automatic incremental switching
between segment numbers, a
settable delay between
segments, cyclic operation, Pr1
is used as the starting path each
time.
CTRG is active at high level and
stops at low level.
V
t
S
1
S
2
Delay
Segment 1
Segment 2
V
1max
V
2max







































































