





























SD710 Series Servo Drive User Manal Chapter 11 Communication
7
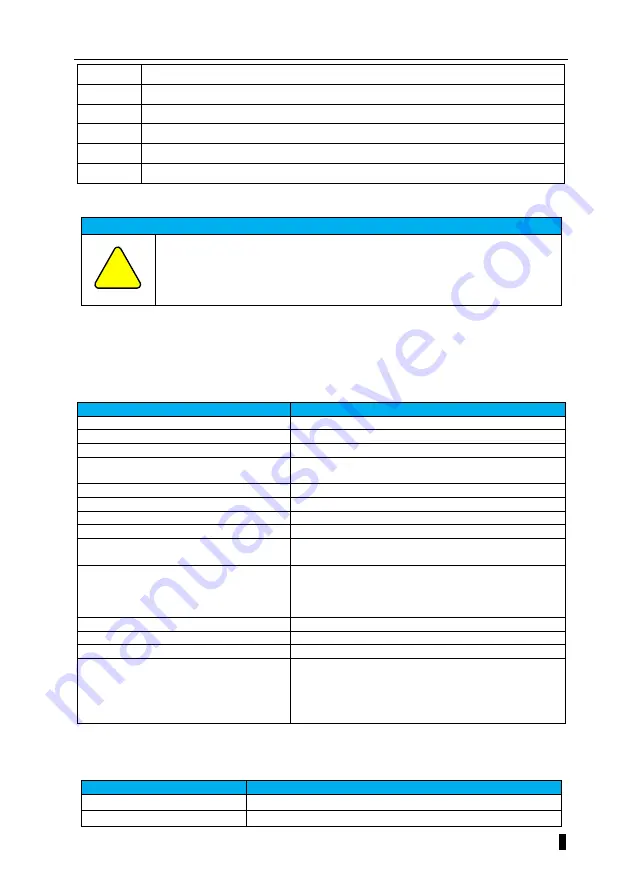
1
Set the communication address (Pn080)
2
Set the communication baud rate (Pn081.X)
3
Set the communication check method (Pn081.Y)
4
Turn on the 485 communication register address mapping switch (Pn087.X=1)
5
Set 1# register mapping source address (Pn088=0x0A00)
6
Set 1# register mapping destination address (Pn089=0x0304)
Attention
!
● The register address mapping function is valid only for 485 communication, and has no
effect on USB communication.
11.2 Canopen communication
11.2.1 Canopen performance parameters
Table 11-6 Description of CAN Performance Parameters
Name
Description
Link layer protocol
CAN bus
Application layer protocol
Canopen protocol
CAN-ID Type
11bit-CAN2.0A
Baud rate
1Mbit/s (default), 500Kbit/s, 250 Kbit/s, 125Kbit/s, 100 Kbit/s,
50 Kbit/s, 20 Kbit/s
Maximum number of stations
63
CAN frame length
0
to
8
Application layer CAN frame type
standard frame
Terminal resistor
120Ω
Supported sub-protocols
CiA-301: Canopen Application Layer and Communication
Protocol
Supported Services
NMT: Network Management
SDO: Service Data Object
PDO: Process Data Object
SYNC: Synchronization Generator
PDO Transmission Type
Time event trigger, synchronous trigger
PDO data supported
4 RPDO, 4 TPDO
SDO transmission method
Accelerated SDO transmission
Supported servo operation mode
Profile position mode
Profile speed mode
Profile Torque Mode
Home position return mode
Interpolation mode
The Canopen communication function of the Servo Drive supports the following different baud rates. The communication
distance is dependent on the baud rate and the communication cable.
Table 11-7 Supported Baud Rate Descriptions
Data transmission rate
Bus cable length
1 Mbit/s
25
500kbit/s
100







































































