























PD-013-42 / TMCM-110-42 Manual (V1.24/2011-NOV-25)
11
Copyright © 2011, TRINAMIC Motion Control GmbH & Co. KG
7.2.1
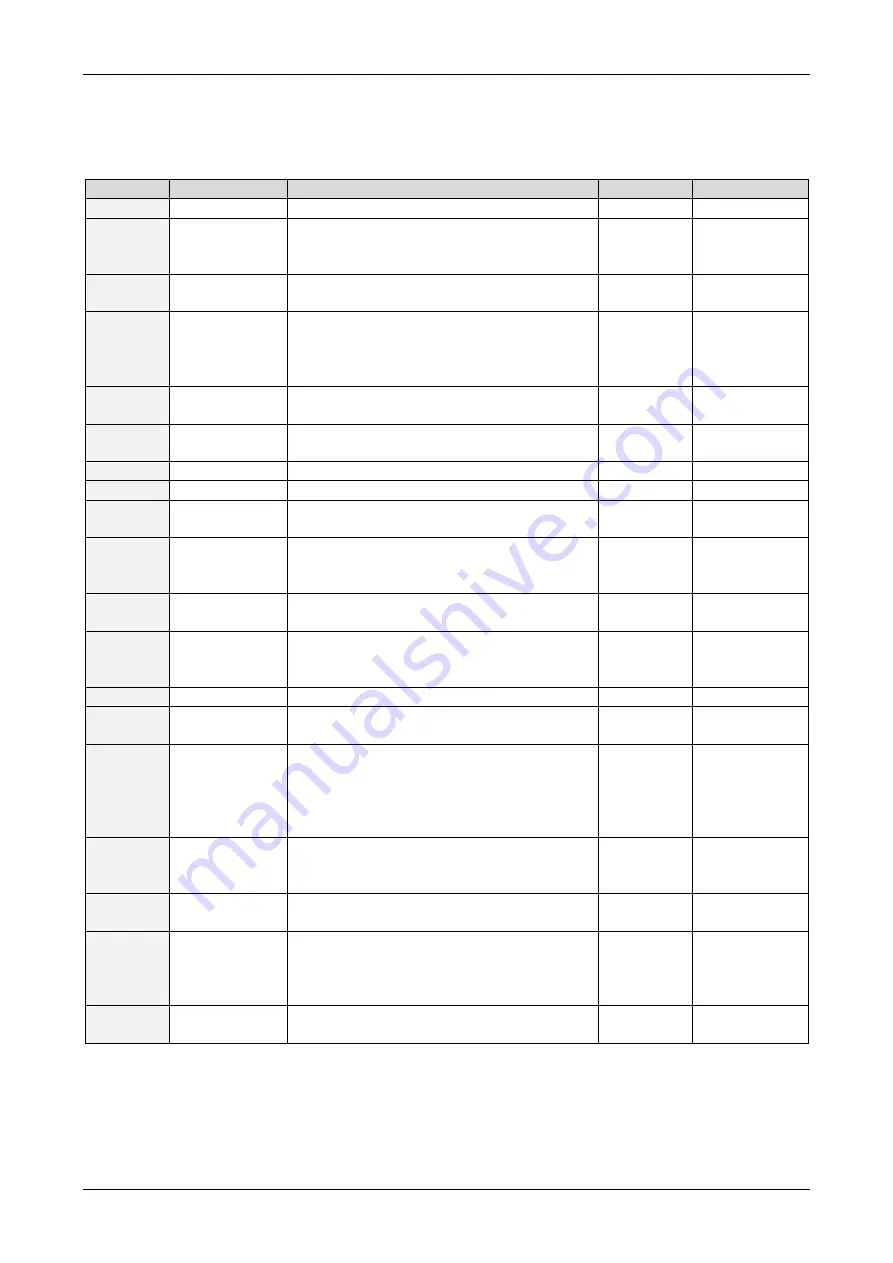
RS485 commands
For RS485 commands write the address byte (default is
A
) first, followed by a command from the following
list. A small command letter provides the actual setting. All values are ASCII.
Command Function
Description
Range
Factory Default
A, a
Acceleration
Acceleration: v = 28.96 * a
0… 2500000
0
C, c
Set Motor
Current
Motor current in percentage of maximum
current
(0… 100% * 1500mA). Refer to 7.2.1.1
0… 100
50
E
Failure Readout Provides Failure readout. Refer 7.2.1.2
8 Bit (SPI)
1Bit (others)
G, g
stallGuard
™
In mode 0 (SPI) the stallGuard
™
feature is
functional.
‘g’
provides
the
actual
stallGuard
™
load value,
not
the setting.
Refer 7.2.1.3
-7… 0… +7
0
L, l
Limit switch
Used to switch on and off reference run
values. Refer 7.2.1.4
byte
M, m
Select Mode
Select chopper mode: 0:SPI, 1:PWM, 2:PHASE,
3 & 4: Combinations, Refer 7.3
0, 1, 2, 3, 4
0
N, n
Alert
Alert output adjustments, Refer 7.2.1.5
2 bit
0
O, o
Set Output
Output adjustments, Refer 7.2.1.6
2 bit
0
P
Set Position
Set position without moving the motor. See
command ‘R’ to read out current value.
32 bit
0
Q
Read I/Os
Provides out of the I/O the values of the
ports GPI, REF_A, REF_B, GPO and ALARM.
Refer to 7.2.1.7
R
Read Current
Position
Provides the current position of the motor.
See command ‘P’ to manipulate this value.
32 bit
S
Changes
address byte
Capital letter followed by the command ‘S’
makes this letter the new address byte:
(“BS” makes “B” the new address byte)
A
T, t
RS485-Timeout
Sets the RS485-Timeout
U, u
Set baud rate
Sets baud rate for RS485 communication.
Refer to 7.2.1.9
0…7
0
V, v
Velocity for
Rotation
Velocity for rotation/reference run
v = n * 0.149157 µsteps/s
Additional parameter 0 or missing: Carriage
Return (CR) comes after acceleration phase
Additional Parameter 1: no delay of CR
+/- 2500000
0/1
0
W
Store
parameters to
EEPROM
Stores actual settings of different parameters
to EEPROM to restart with the same
performance. Refer 7.2.1.11
X
Version number
Provides version number of implemented
Software
Y, y
Standby current
Sets 0… 100% of maximum current after 1
second motor inactivity. For no standby
current use the same value as for “Set motor
current”.
0… 100
20
Z, z
Microstep
Resolution
Sets the maximum microstep resolution (0:
max; 6: min). Refer to 0 and Table 7.10
0… 6
0
Table 7.1: RS485 commands





















































