





























32
CNT-SVX08F-EN
PID Control
Derivative Calculation
The derivative calculation responds to the change in error. In other words, it responds to how
quickly the measured value is approaching setpoint. The derivative calculation can be used to
smooth an actuator motion or cause an actuator to react faster.
However, derivative control has several disadvantages:
•
It can react to noise in the input signal.
•
Setting derivative control requires balancing between two extremes; too much derivative gain
and the system becomes unstable, too little and the derivative gain has almost no effect.
•
The lag in derivative control makes tuning difficult.
•
Large error deadbands, common in HVAC applications, render derivative control ineffective.
Because of these disadvantages, derivative control is rarely used in HVAC applications. The
exception are steam valve controllers which use derivative control to force the steam valve to react
faster to changes.
Throttling Range and Gain
The throttling range is the amount of error it takes to move the output of a system from its minimum
to its maximum setting. It determines the sensitivity of a control system to disturbances. The
smaller the throttling range, the more sensitive and responsive a system will be.
Think of the throttling range as the point at which the system will apply all if its
muscle
to bring
the error back to zero. For example, a throttling range of 2°F (1.1°C) means that a controller will use
all of its power to bring the error to zero when the error is 2°F (1.1°C) or greater. Control becomes
looser as the throttling range increases. Throttling range cannot be programmed directly in a
control system; rather, it is used to calculate the gains (refer to the next section,
).
Gain determines how fast a system moves toward the setpoint. The larger the gain, the more
aggressive the system will be. The proportional, integral, and derivative calculations each have an
associated gain value. The error (proportional), the sum of past errors (integral), and the change
in error (derivative) are multiplied by their associated gains to determine the impact that each has
on the output. As the throttling range increases, the gain decreases and the potential error
increases.
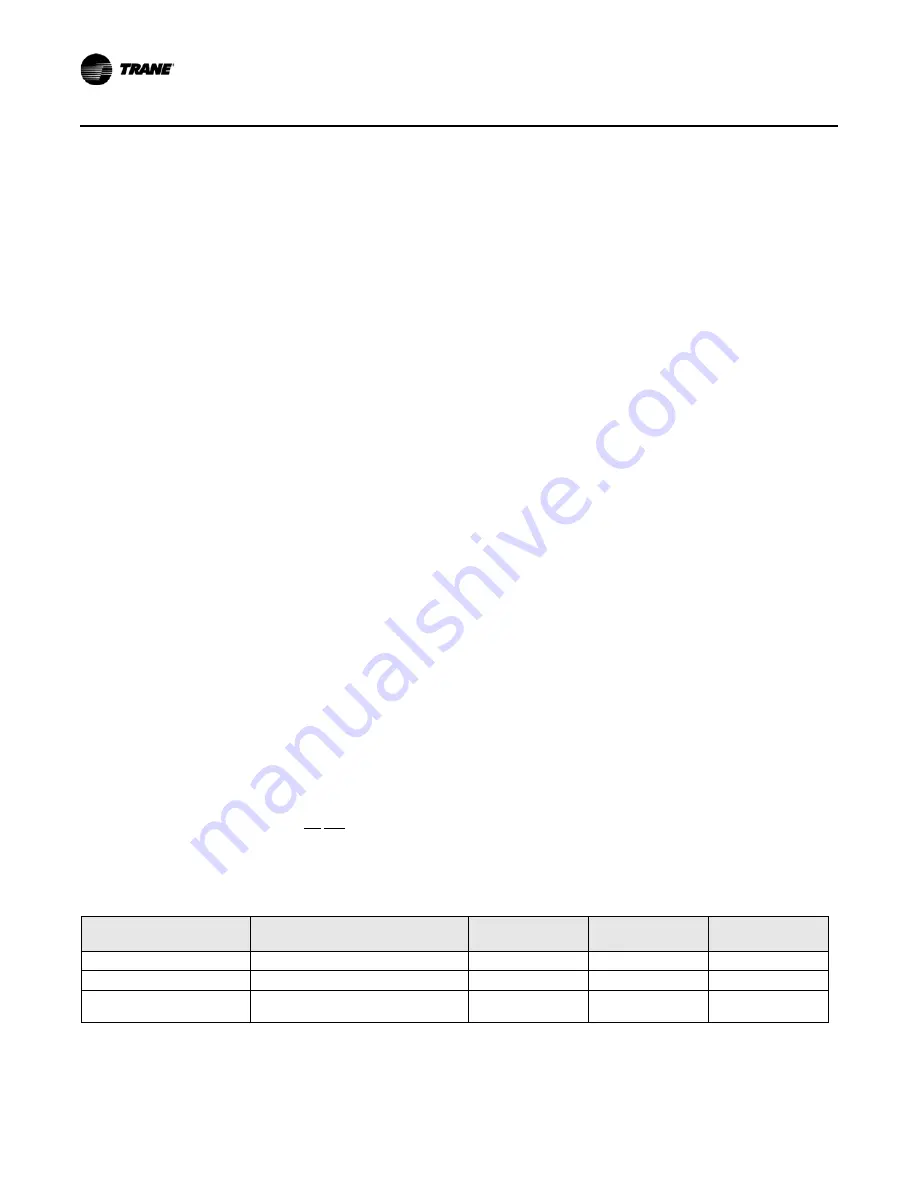
Calculating the Gain
shows the recommended initial values for the proportional and integral gains. Most
applications do not require a derivative contribution, so derivative gain is not shown—it is set to
zero.Trane recommends using a ratio of 4:1 for the proportional and integral gains. Therefore, the
proportional gain should be four times as large as the integral gain. It may be necessary to modify
the values shown in
when tuning a PID loop, but always try to maintain the 4:1 ratio.
Table 7.
Starting gain values for applications
Loop
Output
Throttling
Range
Proportional
Gain
Integral
Gain
Discharge air cooling
Valve position 0–100%
20.0°F (11.1°C)
4.0 (8.0)
1.0 (2.0)
Discharge air heating
Valve position 0–100%
40.0°F (22.2°C)
2.0 (4.0)
0.5 (1.0)
Space temperature
Discharge setpoint
50–100°F (10–37.8°C)
2.0°F (1.1°C)
20.0 (20.0)
5.0 (5.0)







































































