




















6.3 Sensorless-FOC Commutation
1. To spin the motor freely with a sinusoidal current profile, check the “Run” box again. The motor will spin
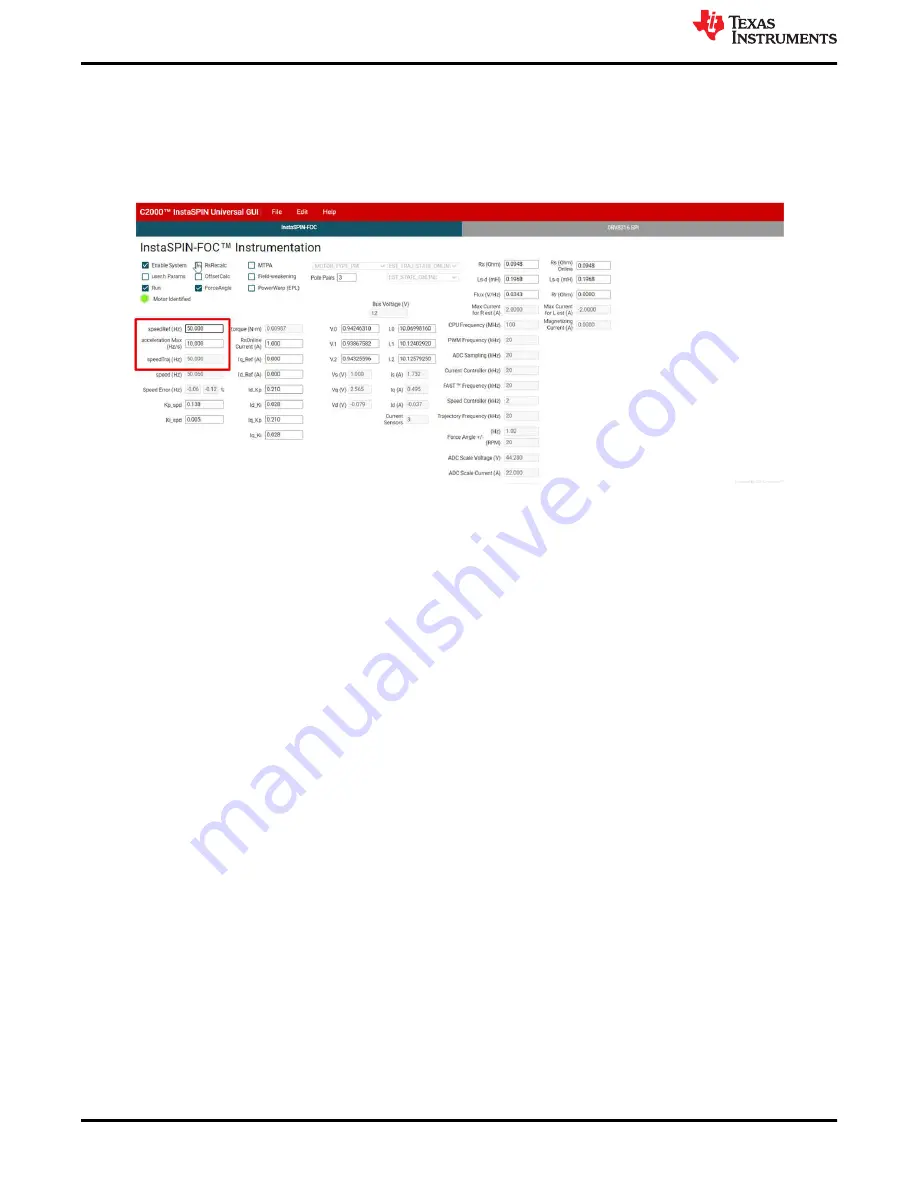
with sinusoidal current at the speedRef (Hz) value in the GUI, which is automatically set to 20.0 Hz. Use the
speedRef (Hz) input to change the current speed of the motor as shown in
. The GUI automatically
calculates the current reference speed using the variable
speed (Hz)
and compares it to the trajectory speed
variable
speedTraj (Hz)
to calculate the
Speed Error (Hz)
and as a percentage.
Figure 6-4. Sensorless Sinusoidal Commutation Using the DRV8316xEVM InstaSPIN
™
GUI
6.4 Torque and Speed Control
To implement more advanced modulation techniques such as torque control, speed control, and algorithms such
as MTPA, Field-weakening, and PowerWarp (EPL) using the DRV8311HEVM InstaSPIN Universal GUI, please
consult the MotorControl SDK InstaSPIN Lab Guide found in
This document contains detailed lab overviews of how to implement each advanced modulation technique when
using sensorless FOC to spin the BLDC motor in Code Composer Studio. In order to use the project with the
GUI, the user must build and compile the project in CCS, and import the .out binary file for that project into the
GUI properties through
. More information can be found in the README when the GUI is first
opened.
Firmware and GUI Application
22
DRV8316xEVM Evaluation Module
SLVUBZ9B – DECEMBER 2020 – REVISED AUGUST 2021
Copyright © 2021 Texas Instruments Incorporated







































































