




















Time (s)
V
oltage (2V/div)
0
20m
40m
60m
80m
100m
Acceleration
[OUT+] − [OUT−] (Filtered)
Time (s)
V
oltage (2V/div)
0
20m
40m
60m
80m
100m
Acceleration
[OUT+] − [OUT−] (Filtered)
Time (s)
V
oltage (2V/div)
0
20m
40m
60m
80m
100m
Acceleration
[OUT+] − [OUT−] (Filtered)
Time (s)
V
oltage (2V/div)
0
20m
40m
60m
80m
100m
Acceleration
[OUT+] − [OUT−] (Filtered)
DRV2624 Demonstration Program
6
SLOU435B – December 2015 – Revised February 2019
Copyright © 2015–2019, Texas Instruments Incorporated
DRV2624 ERM, LRA haptic driver evaluation kit
2.2
Description of the Demo Modes
The following section highlights different features and benefits of using the DRV2624.
2.2.1
Mode Off – Haptics Effect Sequences
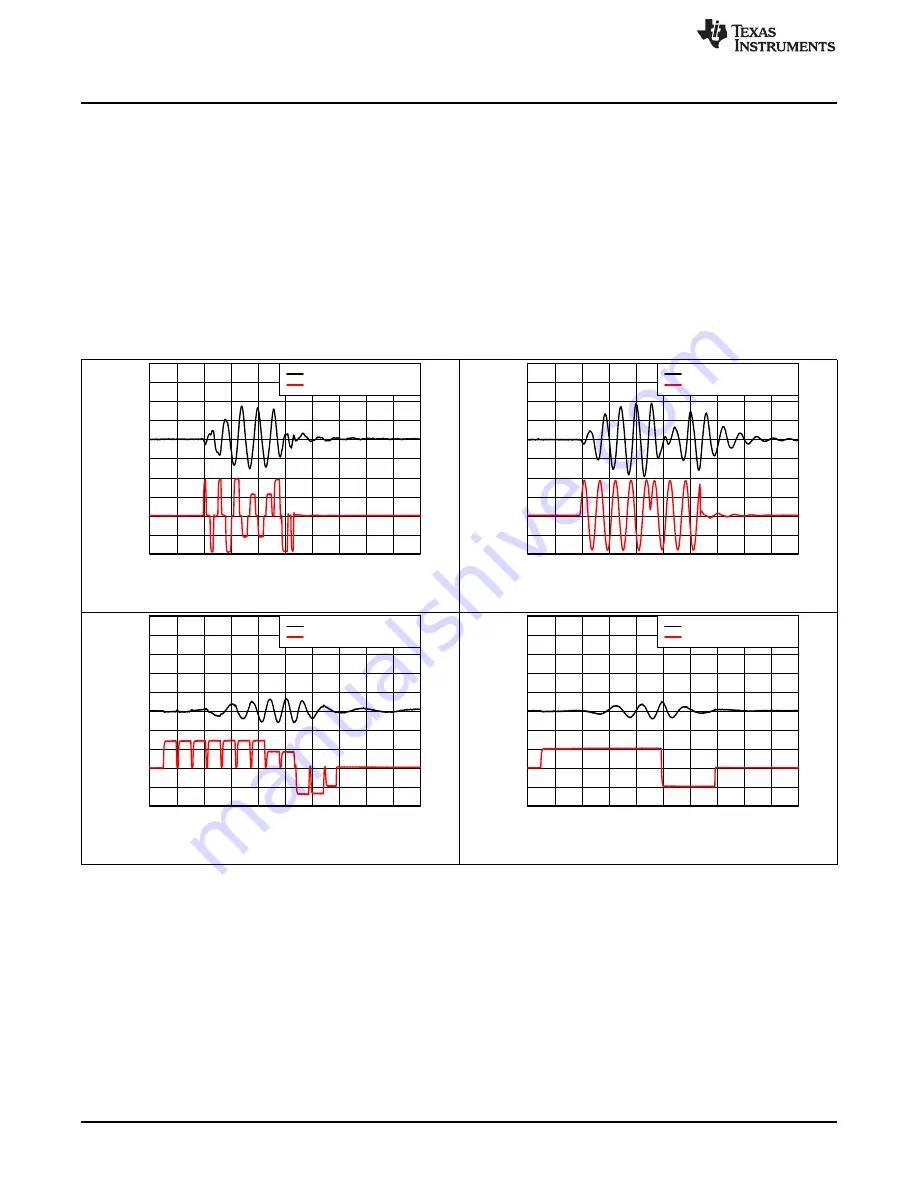
Below are a set of ERM and LRA Sharp Click waveforms. The four effects below show the difference
between closed and open loop operation for both ERM and LRA.
In closed-loop operation for ERM’s, the driver automatically overdrives and brakes the actuator. In open-
loop, the waveform must be predefined with overdrive and braking.
For LRA’s in closed-loop, the driver automatically tracks the resonant frequency, and overdrives and
brakes the actuator. In open-loop, the waveform must be predefined with a static drive frequency, and
overdrive and braking times.
Figure 3. LRA Sharp Click Closed Loop Waveform
Figure 4. LRA Sharp Click Open Loop Waveform
Figure 5. ERM Sharp Click Closed Loop Waveform
Figure 6. ERM Sharp Click Open Loop Waveform
2.2.2
Automatic Braking in Open Loop
The DRV2624 offers automatic braking in open-loop operation for both ERM and LRA. See
and
below for two separate LRA waveforms that show the advantage of using closed-loop breaking
out of open loop operation. Notice that the settling time of the waveform with automatic braking is 15 ms,
significantly faster than the 40-ms time achieved without automatic braking enabled.