

























Tuning Guide
6.3
Reading the OTP Values
After writing the values from the shadow register to the OTP, complete step four on the GUI and read
back the OTP values to make sure they are correct.
6.4
Notes
There are several issues that may occur when tuning the DRV1093 to your motor. The following sections
details several common issues that could happen and how to fix them.
6.4.1
Hitting Current Limit
If the beginning of the current waveform looks like
, there might be a problem with the current
limitation of the chip itself. If the align time is small, the current limit of the chip is reached and the chip
turns itself off, waits for a set amount of time then tries again. If you see a waveform like the one below
either add a 1-
Ω
resistor to each one of the 3 phases or lower the V
IN
to around 4.8 V.
Figure 19. Motor Hitting Current Limit and Trying Again
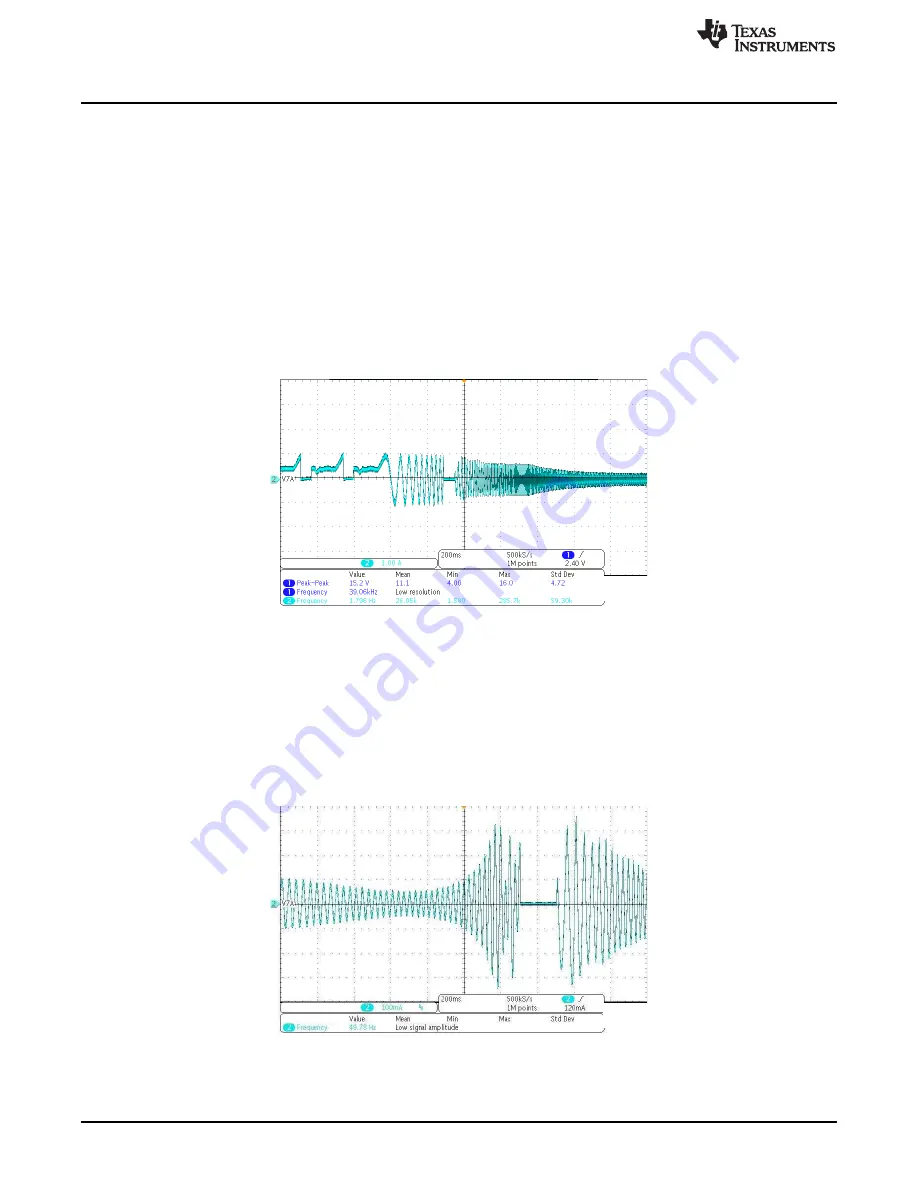
6.4.2
Open to Close Loop Threshold High
Sometimes even though the motor will go into closed loop at a certain threshold does not mean that it is
optimized. If the current waveform resembles the one shown in
before it goes into closed loop (it
goes into closed loop after the flat line in the middle where the GUI is measuring the BEMF) then it means
that the Open to Closed Loop Threshold is high. This is an inefficient way to start up the motor because it
is dangerously close to hitting a current limit and stopping the motor waiting and trying again. The
optimized performance would be to make the current funnel down until it hits closed loop control.
Figure 20. OTC Threshold not Optimized
18
DRV10963 Evaluation Module
SLAU643 – July 2015
Copyright © 2015, Texas Instruments Incorporated







































































