


























28
Step 6:
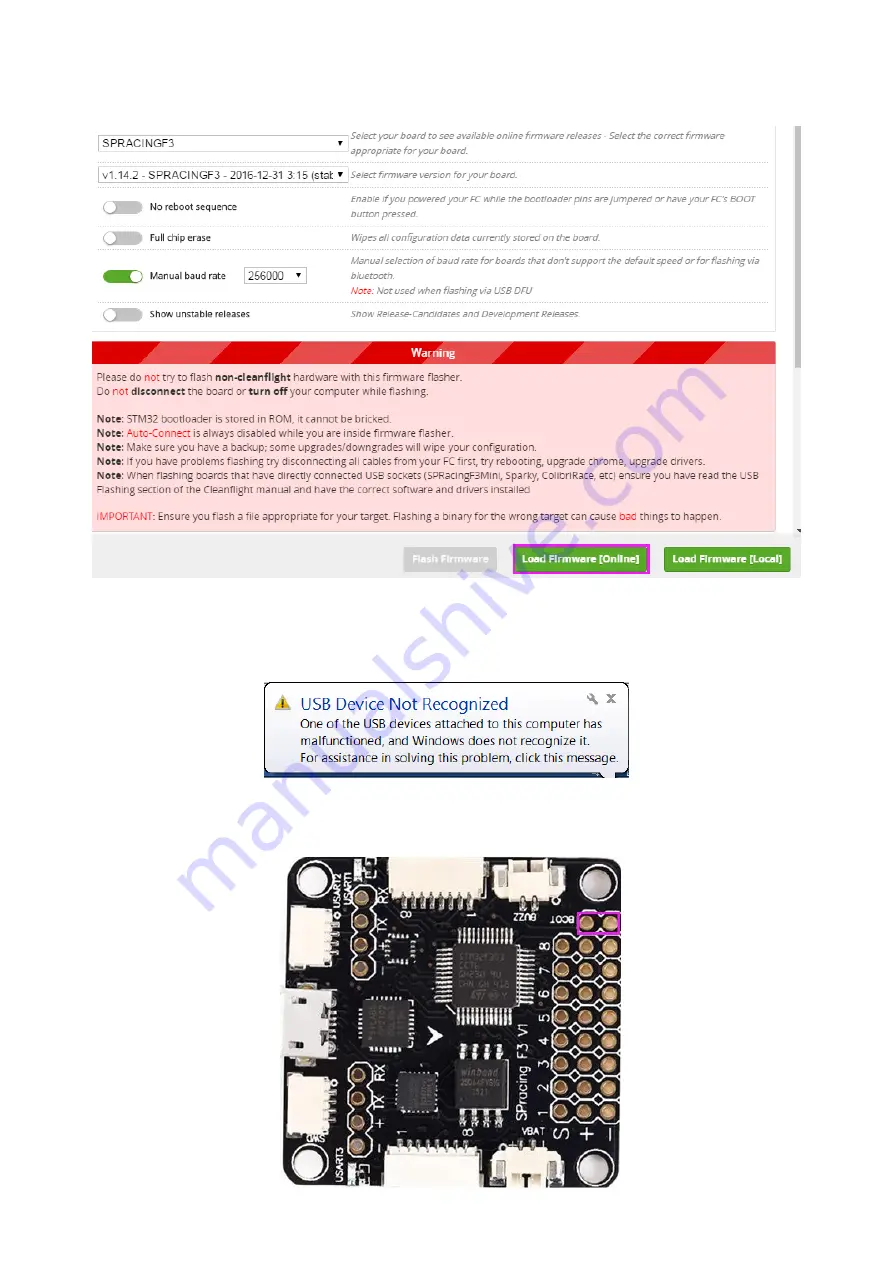
There are two Load Firmware options:
Load Firmware[Online]
or
Load Firmware[Local]
, you
are recommended to select
Load Firmware[Online].
Step 7:
After loading, click
Flash Firmware
to start flashing. Wait for the flash being
done
.
Note: Do not pull out the USB cable during firmware flash, or you will get an error “USB Device Not
Recognized” if you reinsert the USB cable.
Thus, you need to pull out the USB cable, and use the tip of a tweezer or a screw driver to connect
the two BOOT pads (as shown below) for a while.
SunFounder