


























R12 Robot Manual
page
15
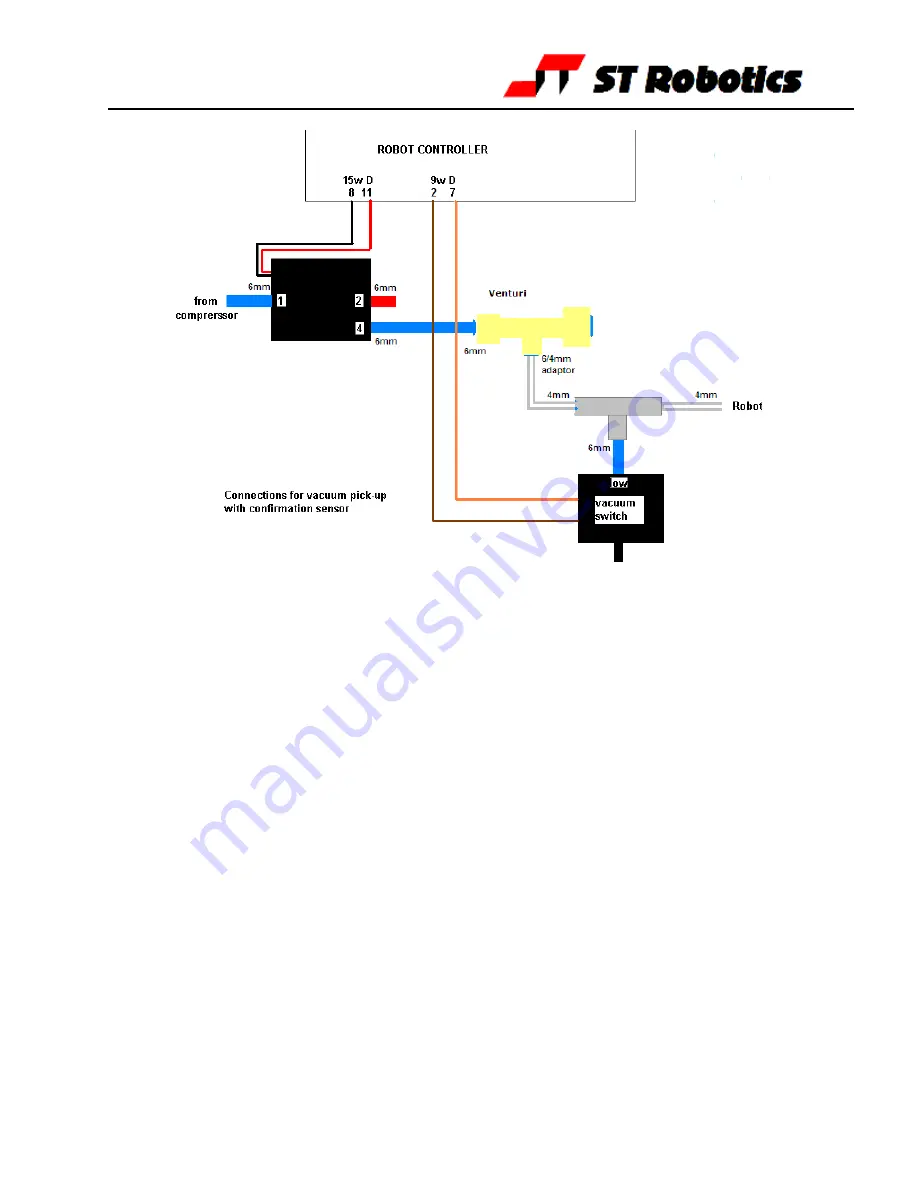
Vacuum pick-up connections:
Change from gripper to vacuum:
There will be a total of 3 valves. One for the gripper as above and one for the vacuum as
above. Both these valves connect to PA 0 so the command GRIP will operate either of them.
A third valve is provided to switch between the two, connected to PA 2.
So to operate the pneumatic gripper PA 2 should be OFF, just enter GRIP and UNGRIP.
To operate the vacuum use
PA 2 ON
then
GRIP
or
UNGRIP
Programming the optional vacuum sensor:
The vacuum switch is connected to PB 6. You can quickly check this with
GRIPCHECK
Insert this word at a suitable place for the robot to check it has a valid pick e.g.
JIG GRIP WITHDRAW GRIPCHECK
If there is no vacuum (object not picked) you will get “Grip fail” error.
Adjusting the vacuum sensor.
It has already been set at the factory but you can adjust as follows:
1. type GRIP (remember that this consumes a great deal of air and you may need to
UNGRIP then allow the compressor to recharge before trying again.
2. Type PP to display the input port. You should see 11111111
3. Adjust the sensor using the 1.5mm Allen key supplied until you see 11011111 then
back off again until you see 11111111.
4. Cover the vacuum cups and the display should change back to 11011111