























User Manual for the Type 8300 Compatt 6
(and Variants)
UM-8300-Compatt 6
Issue B3
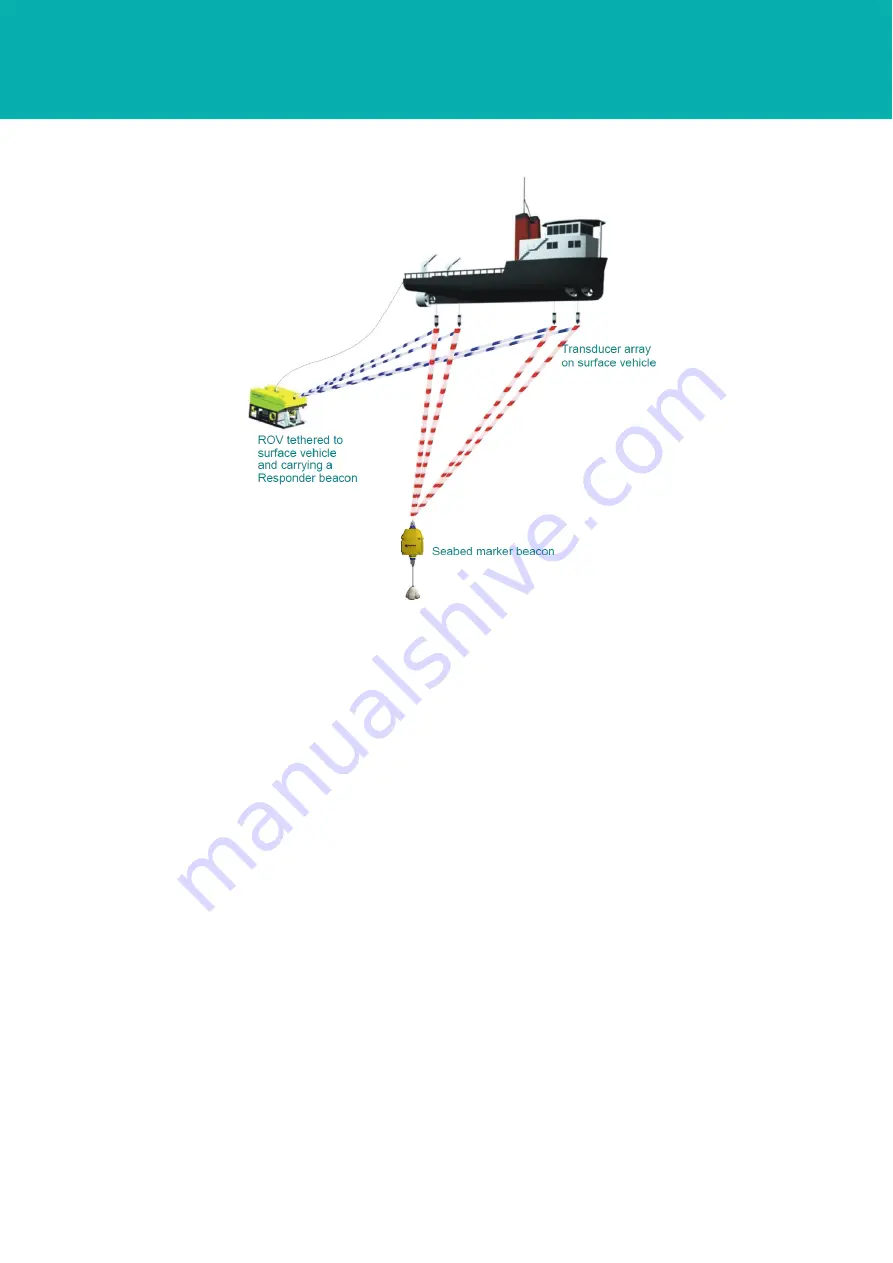
Figure A–2 Typical SBL System
A.2.2 Baseline Distances
The term ‘short’ is used as a comparison against long baseline techniques, where the baseline length
usually exceeds 100 metres and can exceed 1000 metres.
If the distances from the transducers to an acoustic beacon are measured using the techniques
described for LBL, then the beacon’s position within the vessel’s co-ordinate frame can be computed.
Furthermore, if redundant measurements are made, a best estimated can be determined, which is
statistically more accurate than the basic position calculation.
A.2.3 Principles
SBL systems transmit from one but receive on all transducers. The result is one distance (or range)
measurement and a number of range (or time) differences.
With an SBL system the co-ordinate frame is fixed to the vessel, and is therefore subject to the
rotational motions of roll, pitch and yaw. This apparent disadvantage can be overcome by using
additional VRU and gyrocompass instruments, external to the SBL system, to supply measurements
of roll, pitch and heading. The additional measurements allow the co-ordinates of the beacon to be
transformed mathematically to remove the effects of these rotational motions.
If the requirement is to estimate the position of the vessel in some fixed or ‘inertial’ frame, such as one
fixed to the seabed, then at least on beacon must be placed in a fixed position on the seabed and used
as a reference point. This is the principle used for dynamic positioning vessels.
shows an example of a system that has a transponder beacon fixed to the seabed and a
responder beacon located on an ROV. In this case the system can calculate the position of the vessel
and of the ROV within a reference frame fixed to the seabed.
Appendix A – Acoustic Positioning Methods
121







































































