
























Hussar Robot Chassis Manual
Smart Restaurant Solutions
10
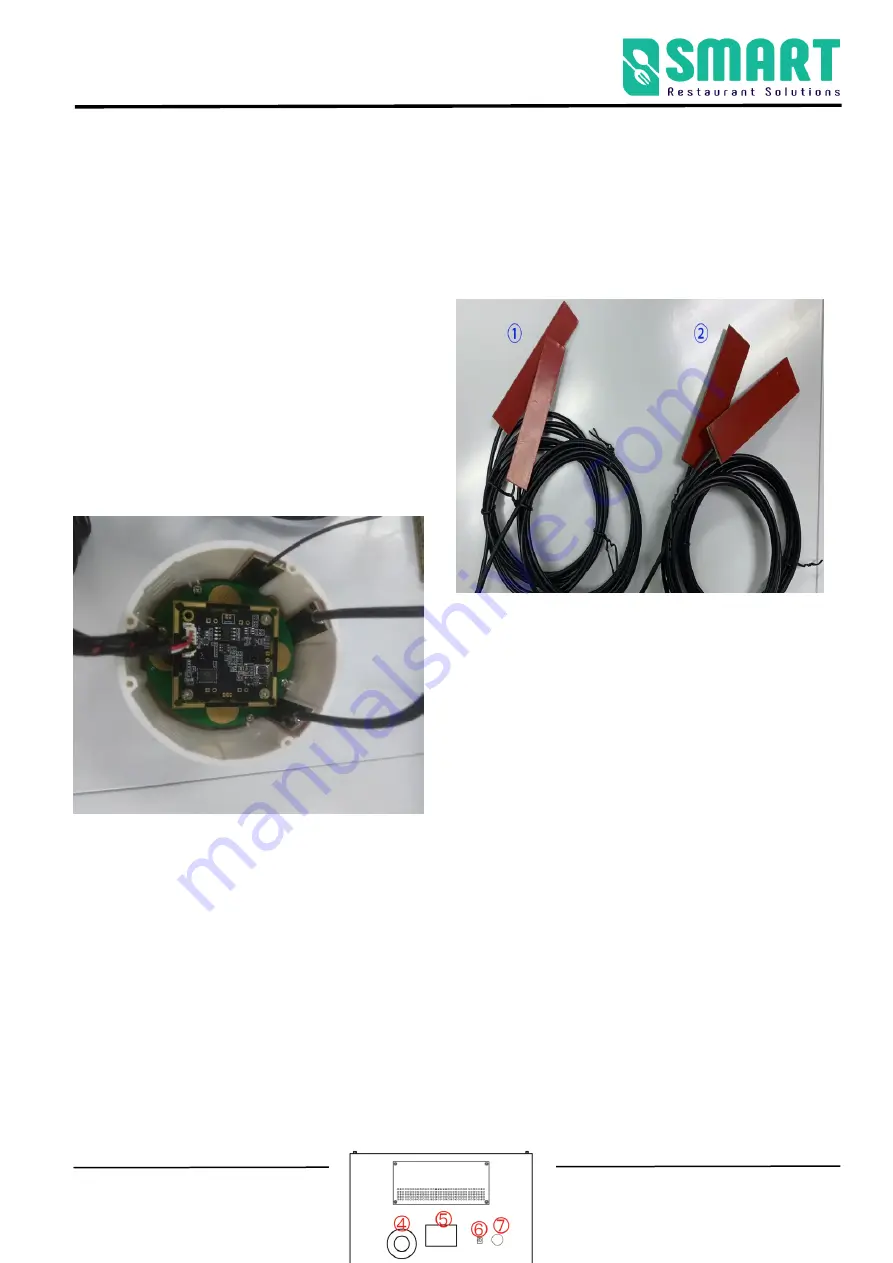
Installation of 4G router main and secondary antenna
Note: The antenna cannot be pasted on metal parts, nor can it be pasted in the surrounding metal part
shielding cover; it should be pasted on the
surrounding plastic parts to prevent the antenna
signal from being shielded by the metal parts. (It
can also be pasted inside the infrared vision camera
module shell)
①
4G router secondary antenna
②
4G router main antenna
2
,
Use your robot
A. Boot
The power button is located on the base
⑦
on the back of the robot. It is
a button switch. Press it once to turn it on, and press and hold the power
button for 3 seconds to turn it off.


































































