

















Simrad AP26 and AP27 Autopilots
2
20221586B
Document revisions
Rev Date Written
by
Checked by
Approved by
A 18.03.04
NG
ThH
ThH
B 27.04.04
Document history
Rev. A
First edition.
Rev. B
FU50 substituted by FU25. Part no. for AC40 Power PCB ass’y, page 124
corrected. Added notes in chapter 3.19. Minor corrections in text and
display pictures.
Summary of Contents for AP26
Page 1: ...MANUAL Simrad AP26 and AP27 Autopilots ...
Page 2: ...This page is intentionally left blank ...
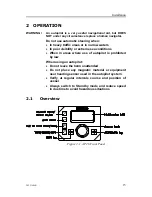
Page 38: ...Simrad AP26 and AP27 Autopilots 36 20221586B 1 2 4 3 7 5 6 8 Figure 2 3 ...
Page 84: ...Simrad AP26 and AP27 Autopilots 82 20221586B This page is intentionally left blank ...
Page 152: ...Simrad AP26 and AP27 Autopilots 150 20221586B This page is intentionally left blank ...







































































