




















Commissioning
4.5 Connect MASTERDRIVES MC to the Technology-CPU
Connecting SIMOVERT MASTERDRIVES MC to the Technology-CPU
Product Information, 03/2008, A5E00272072-05
81
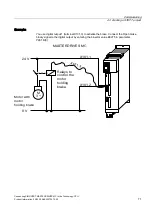
● Set the required value in the dialog box for the application-dependent parameter
U922.i005 (reference value of the encoder interface):
Figure 4-55 Dialog box for setting U922.i005
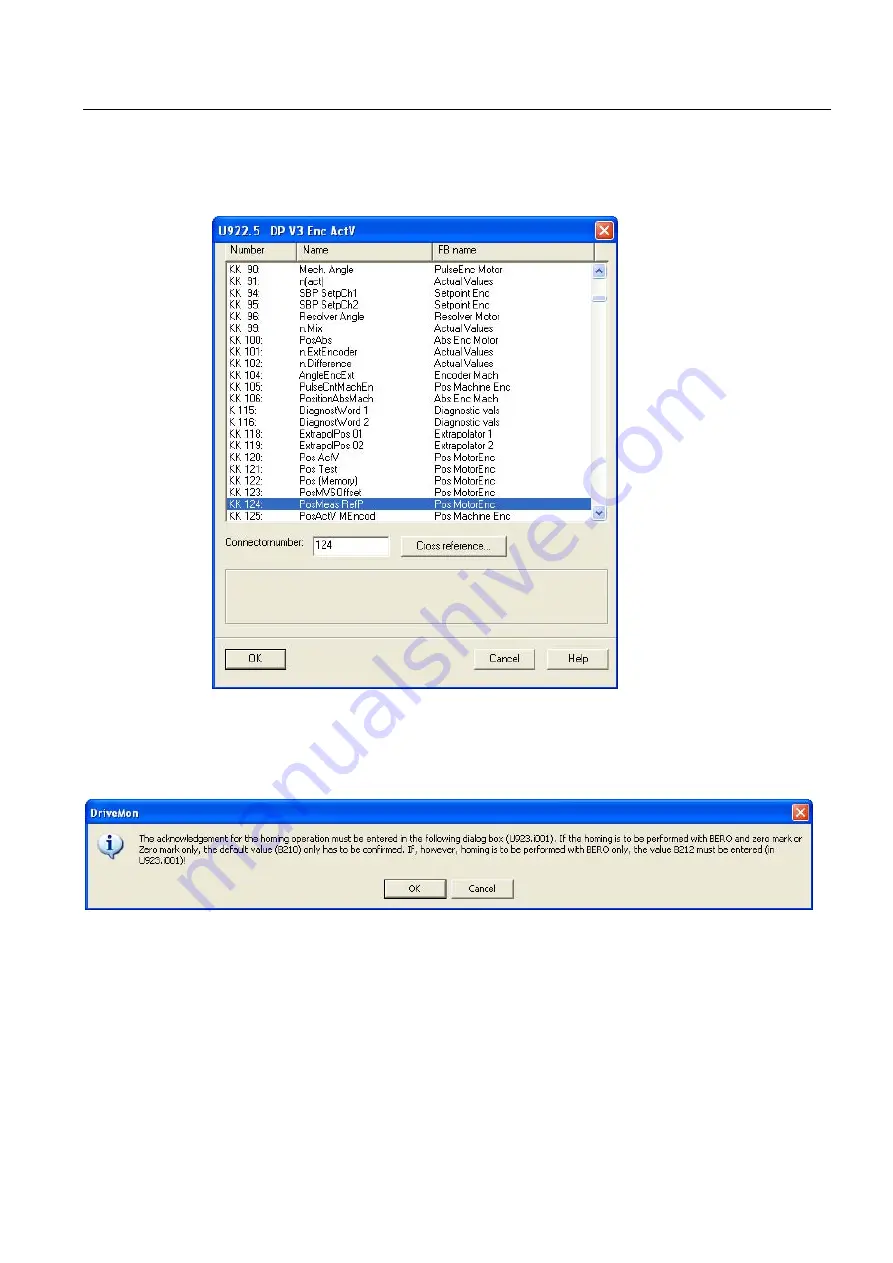
● Carefully read the contents of the message box with the setting information for the
application-dependent parameter U923.i001 (reference point checkback signal of the
encoder interface) and acknowledge this message.
Figure 4-56 Message box with setting information for U923.i001







































































