





























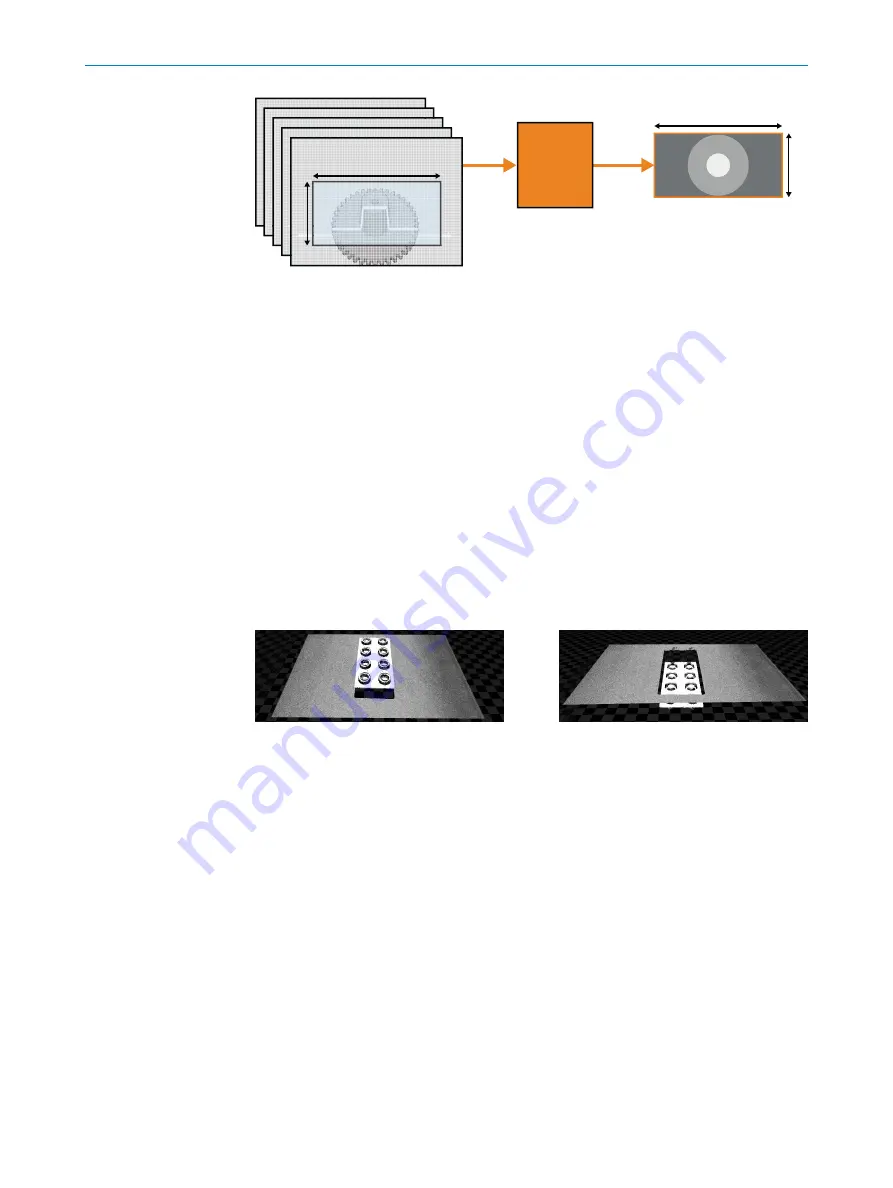
3D extraction
processing
module
1
H
e
ig
ht
[S
c
a
n3
d
E
xt
ra
c
tio
n1
]
Width[Scan3dExtraction1]
H
e
ig
ht
[R
e
g
io
n1
]
Width[Region1]
Figure 7: 3D image
1
3D extraction processing module
In Linescan 3D mode, the
Height
and
Width
parameters of the region
Scan3dExtraction1
define the dimensions of the 3D extraction output frame. Typically, the
Width
parameter
of an extraction region is locked to the same value as the
Width
of the source region on
the sensor.
To get a 3D image, several 2D images are required. Each 2D image corresponds to one
profile,
see "Measuring with a 3D camera", page 11
. The 2D sensor images are trans‐
formed into lines in the 3D extraction output frame. Each line in the frame corresponds
to one 2D image. This means that the
Height
value of the frame tells how many 2D
images that are used to generate the resulting 3D image. The 3D image has
Width
times
Height
pixels.
The
RangeAxis
parameter defines how the lines in the 3D extraction output frame are
visualized. The parameter is set to
Reversed
by default, which means that high values in
the range data correspond to low values on the imager Y axis. If the parameter is set to
Standard
, high range values correspond to high values on the imager Y axis and the visu‐
alized 3D object appears upside down. See
and
for examples.
Figure 8:
RangeAxis
set to
Reversed
Figure 9:
RangeAxis
set to
Standard
7.4.3
Device scan type
The camera can be configured to output either the raw data from the image sensor or
the 3D profile data. In the user interface, you select
Image
to see the raw sensor data as
a 2D image or
Data collection
to get the 3D profile data,
.
The camera uses the parameter
DeviceScanType
to control if 2D images or 3D profiles
are acquired. This parameter is set when you select
Image
or
Data collection
. Setting the
DeviceScanType
automatically sets the relevant features for the correct mode, as
described below.
Image
DeviceScanType
is set to
Areascan
.
The following settings are done automatically:
RegionMode[Region0]
= On
RegionMode[Region1]
= Off
RegionMode[Scan3dExtraction]
= Off
7
CONFIGURATION
26
O P E R A T I N G I N S T R U C T I O N S | Ranger3
8020774/14IM/2019-07 | SICK
Subject to change without notice





















































