





























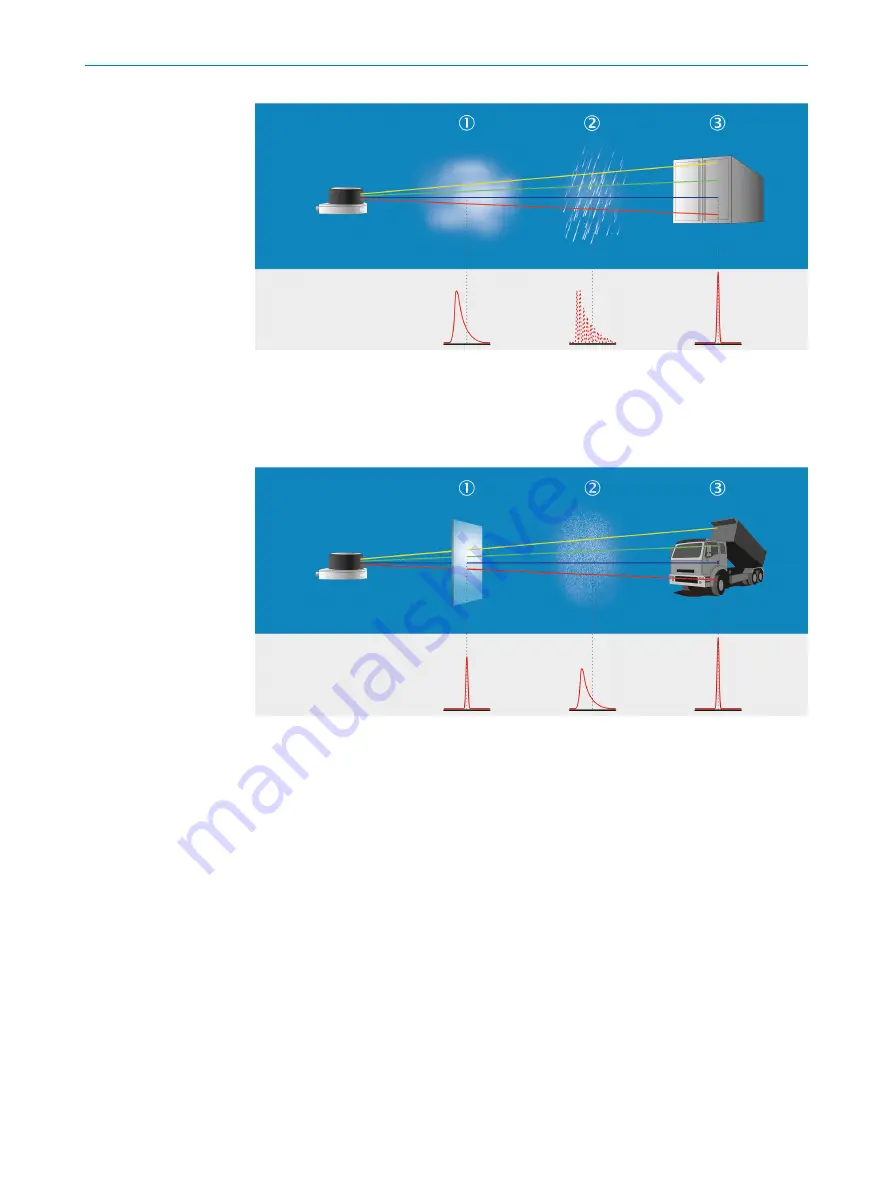
Figure 14: Multi-echo analysis: example industrial application for ports, cranes, and traffic.
1
Fog
2
Rain
3
Measuring object
Figure 15: Multi-echo analysis: example industrial application for mining.
1
Glass pane
2
Dust
3
Measuring object
3
PRODUCT DESCRIPTION
18
O P E R A T I N G I N S T R U C T I O N S | MRS1000
8020494/1AZF/2021-05-10 | SICK
Subject to change without notice





















































