





























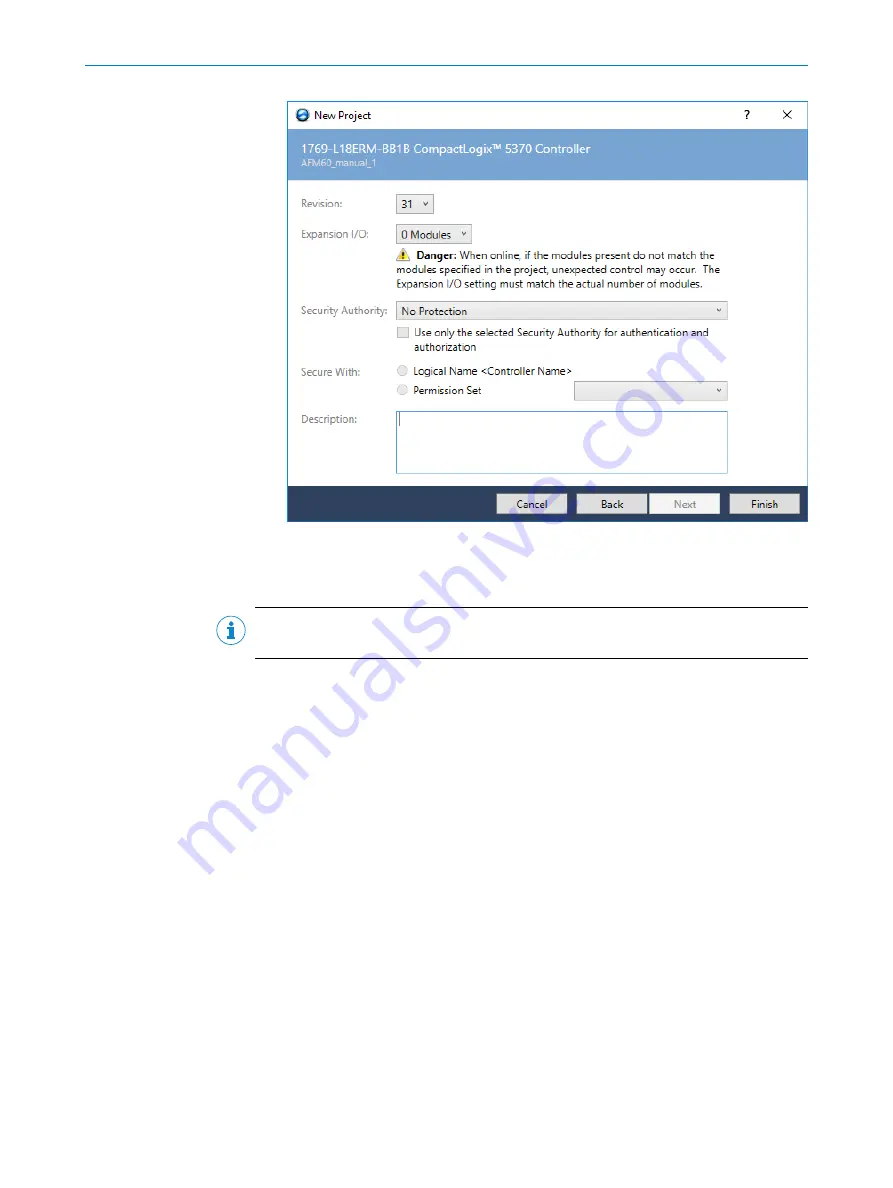
Figure 30: Projecting the hardware
4.
Click
OK
.
✓
The
RSLogix 5000 [Name]
window opens.
NOTE
Type and Chassis Type must match your controller.
You can then integrate and configure the encoder in the project in three ways:
•
Using an EDS file (
see "Integration and configuration using an EDS file", page 52
•
Using the function block (
)
•
As generic module (
see "Integration of the encoder as generic module", page 67
)
Due to the fast and easy integration, we recommend integrating the encoder using an
EDS file.
Please note that with older encoders before DateCode (YYWW) 1535 (firmware version
before 2.1.8), only integration as generic module is possible.
5.4
Integration and configuration using an EDS file
The EDS file (electronic data sheet) contains all information about the parameters and
the operating modes of the absolute encoder. The absolute encoder can be configured
and put into operation using the EDS file.
5.4.1
Requirements
•
An Allen-Bradley control system with
RSLogix 5000
control software V22 or later is
used (or another controller that allows integration using an EDS file).
•
The encoder is integrated into the EtherNet/IP network (
•
The EDS file has been integrated into the control software using the Rockwell
Hardware Installation Tool.
5
CONFIGURATION USING A PLC
52
O P E R A T I N G I N S T R U C T I O N S | AFS/AFM60 EtherNet/IP
8014213/1EF3/2021-12-08 | SICK
Subject to change without notice