





























Design Guidelines
Transport System Design
86
MagneMotion
Rockwell Automation Publication MMI-UM007F-EN-P - September 2020
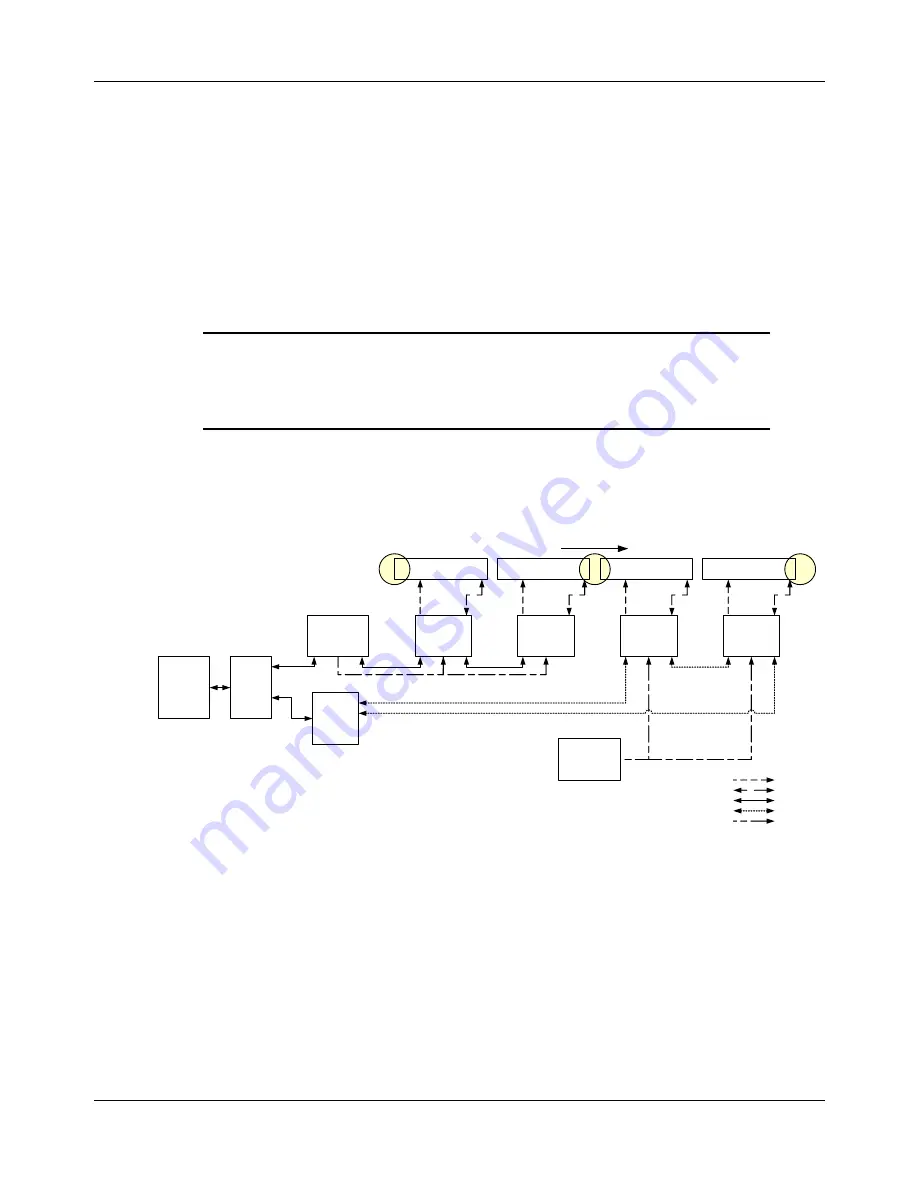
Using Both RS-422 and Ethernet Motors
Transport systems can easily combine both RS-422 and Ethernet drives. Drive types are typi-
cally combined in a transport system when new motors with drives that use Ethernet (QSHT
5700 inverters) are added to an existing RS-422 system. When adding new drives using Ether-
net communication, it is recommended that they be added as one path to simplify configura-
tion. Nodes are needed at the junction of RS-422 and Ethernet paths as shown in
to make the transition between motor types. Additionally, all
Ethernet motors and their location on the path must be defined in the MICS file (see
Straight Paths
Figure 3-25: Ethernet Motor Wiring – Two Paths, Ethernet Chain and RS-422 Chain
NOTICE
When combining QSMC drives using RS-422 communica-
tion and QSHT 5700 drives using Ethernet communication,
the power requirements for the drives are different and
require different power buses as shown in
.
Straight Transport System (Recommended):
Mixed Ethernet and RS-422 motors
One Ethernet Chain connects to Switch
One RS-422 Chain connects to Node Controller
Two Paths
Ethernet
Relay
Simple QSHT Motor
QSHT 5700
Inverter
QSHT Motor
QSHT 5700
Inverter
QSHT Motor
QSMC
Motor
Controller
QSMC
Motor
Controller
Term
QSHT Motor
P1M1
x.y.1.1
P1M2
x.y.1.2
P2M1
P2M2
Host
Controller
HLC &
Node
Controller
RS-422
RS-422
Enet
Switch
x.y.0.11
Ethernet
RS-422
Drive
Sense
Ethernet
Downstream
Power
270-400V DC
Power Supply
Ethernet
458-747V DC
Power Supply
x.y.0.11