


























11
Pic 11 Erase movable dots on the map
8
)
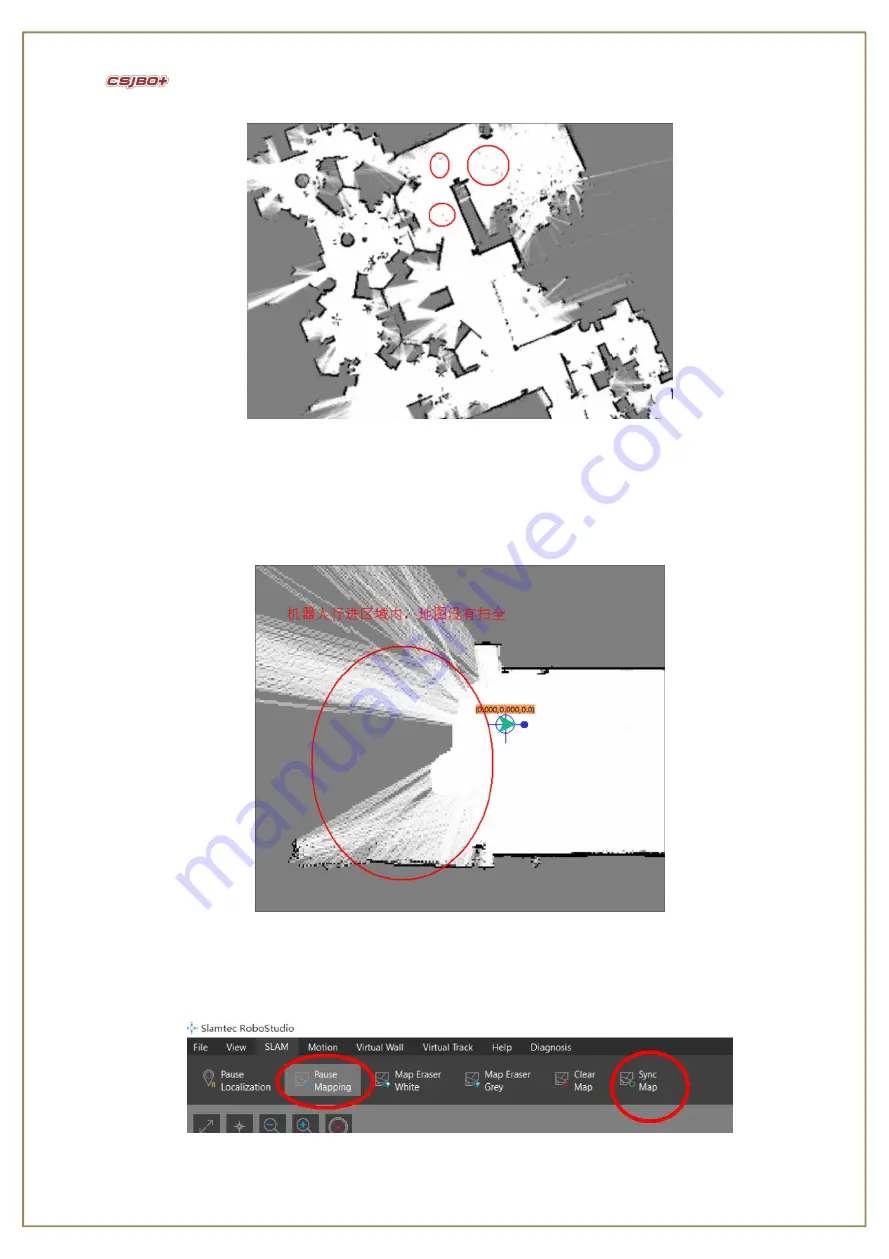
In order to make sure the map keep in a full completeness, laser radar should have detected all possible walking road
ahead in all 360
°
so that laser will be in match up with as more reference points as possible, which will eventually enhance
the completeness of mapping, shown as pic 12
;
Pic 12 Incomplete Mapping
9
)
When it finished map scanning, please save it before you are about to walk here and there in the mapping area. Click
Robot Studio to sync up the map, then click “Pause Mapping” to stop her continuous mapping, shown as Pic 13;
Pic 13 Sync Up, Pause Mapping







































































