






















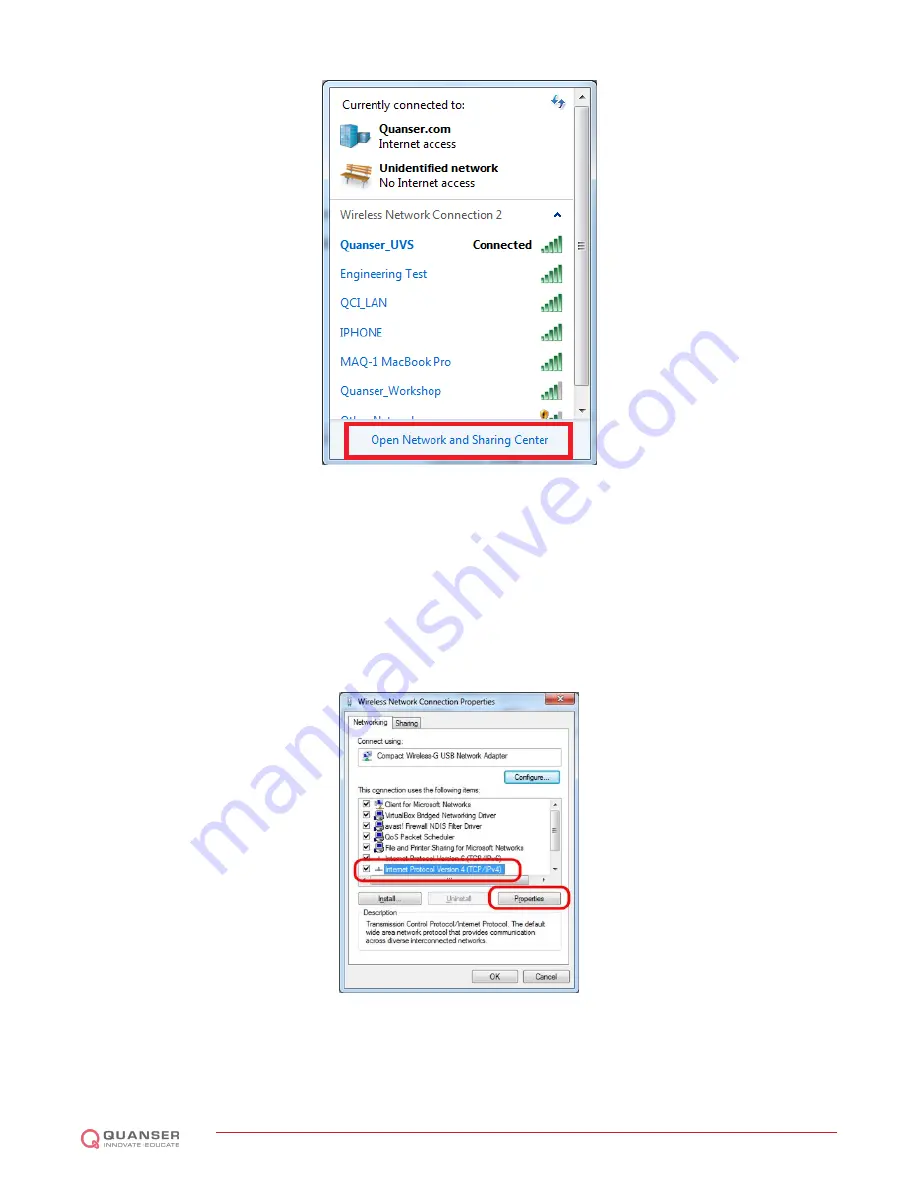
Figure 3.1: Open network settings. The
Unidentified network
is related to the wired connection to the router. If you are
using a wired connection to the router and you don't have wireless adapter, you will not see Quanser_UVS network.
5. Click on
Change adapter settings
.
6. Right-click on the
Local Area Connection x, Unidentified network connection
and click
Properties
. If you chose
wireless connectivity between your PC and the router, choose the
Wireless Network Connection
instead, right
click on it and click
Properties
.
7. Under
This connection uses the following items:
, select
Internet Protocol Version 4 (TCP/IPv4)
and click
Properties
.
Figure 3.2: Network properties
8. Instead of obtaining an IP address of the computer automatically, select
Use the following IP address
and enter
the following:
QBOT 2 - User Manual
DRAFT - April 14, 2015