





























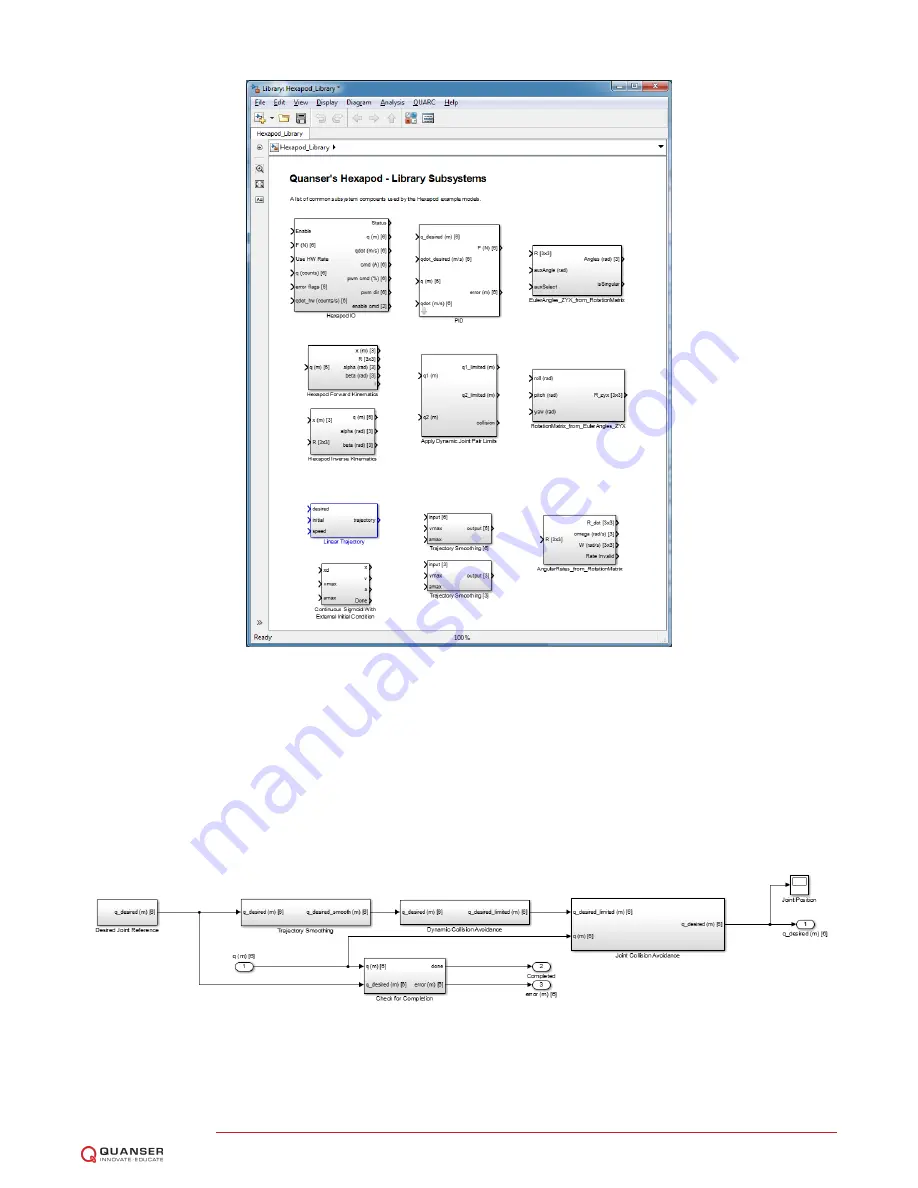
Figure 2.12: Hexapod library used in QUARC controllers supplied
2.8.1
Position Reference
As shown in Figure 2.13, the Hexapod positions commands are smoothed in the
Home Reference \Trajectory
Smoothing
subsystem. The
Linear Trajectory
block takes in the desired position of each joint, the initial joint po-
sitions as well as the maximum allowed speed for each joint. The block then outputs a calculated trajectory for each
joint to follow. This trajectory is the position command to each joint.
Figure 2.13: Hexapod position commands are smoothed and checked for collisions
The position references go through the collision avoidance logic to prevent adjacent joints from colliding with each.
HEXAPOD Laboratory Guide
v 1.3