





























Chapter 4 Eletrical Functions
Document Version V1.1.0(01/11/2023) 21
Chapter 4
Electrical Functions
4.1
Panel description
The electrical components of AP3X Robot are integrated in the base and
connected to the peripheral equipment via the interface panel. Three interface panels
are evenly configured at the side of the base and their number corresponds to their
axis number on the base. The protection grade of the interfaces on the panel is up to
IP65. The interface panels are described as follows:
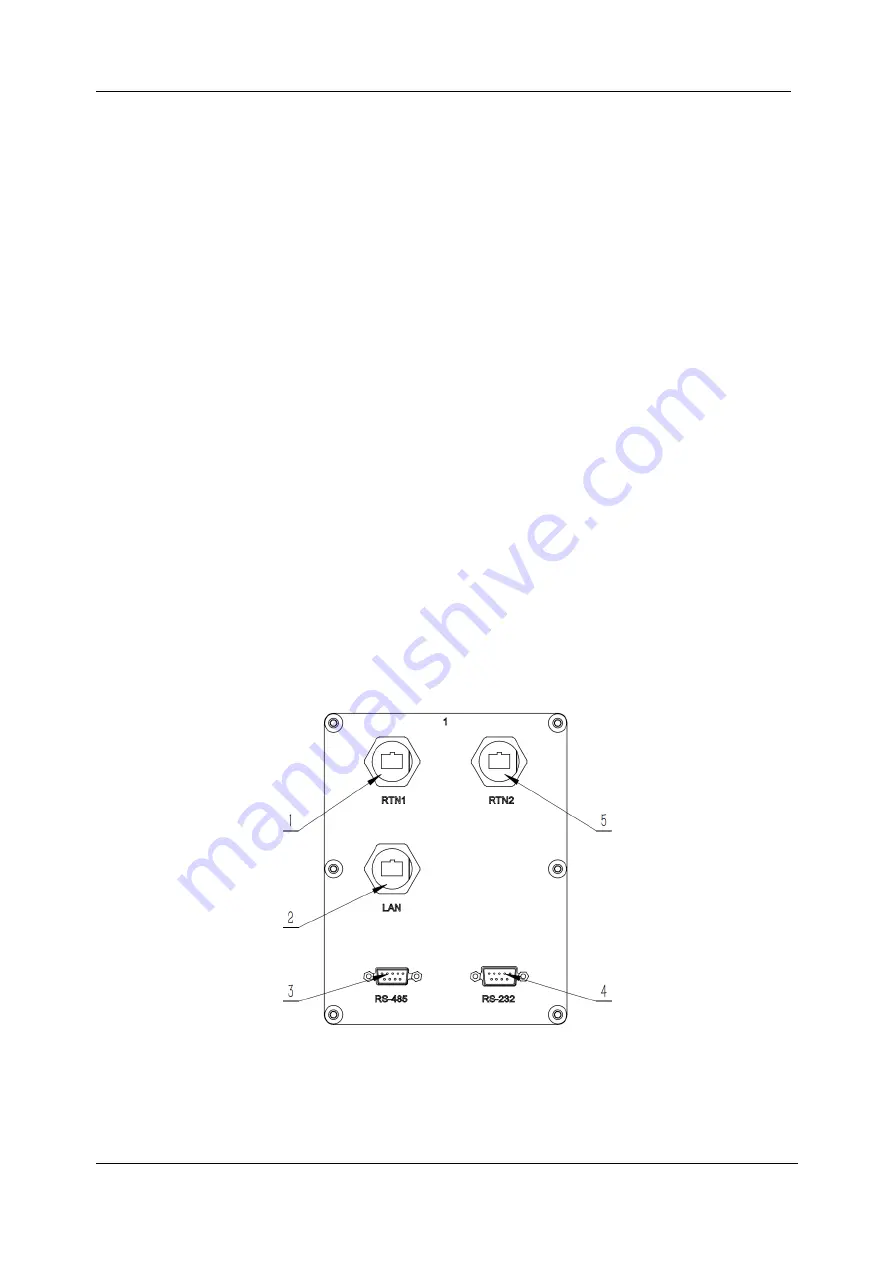
Interface panel 1
The interface panel 1 consists of real time network port,non real time network
port, RS485 and RS232 interfaces, as shown inFigure 4-1.
Figure 4-1 Interface panel 1
1 RTN 1
4
RS-232







































































