























20
PowerBox-Systems
− World Leaders in RC Power Supply Systems
Intelligent programming aid:
If you wish to set up multiple tasks in order to move the wheel doors to
several positions, it should be obvious that the new task’s initial positional
value and start time are determined by the previous position and time for
the servo concerned. This is carried out automatically, helping to speed up
the programming procedure, and eliminates the need for you to note down
the servo’s previous position and stop time.
A similar situation applies when you set the retract process
DOWN » UP
.
When you set up the extend process
UP » DOWN
, the positional values for
Start and Stop for that servo are already entered as Stop and Start.
The following example demonstrates how one wheel door opens half-way
when the transmitter switch is operated, pauses for a while, then runs to
its end-point. When the switch is reversed, the door returns to its original
position in a single movement lasting three seconds.
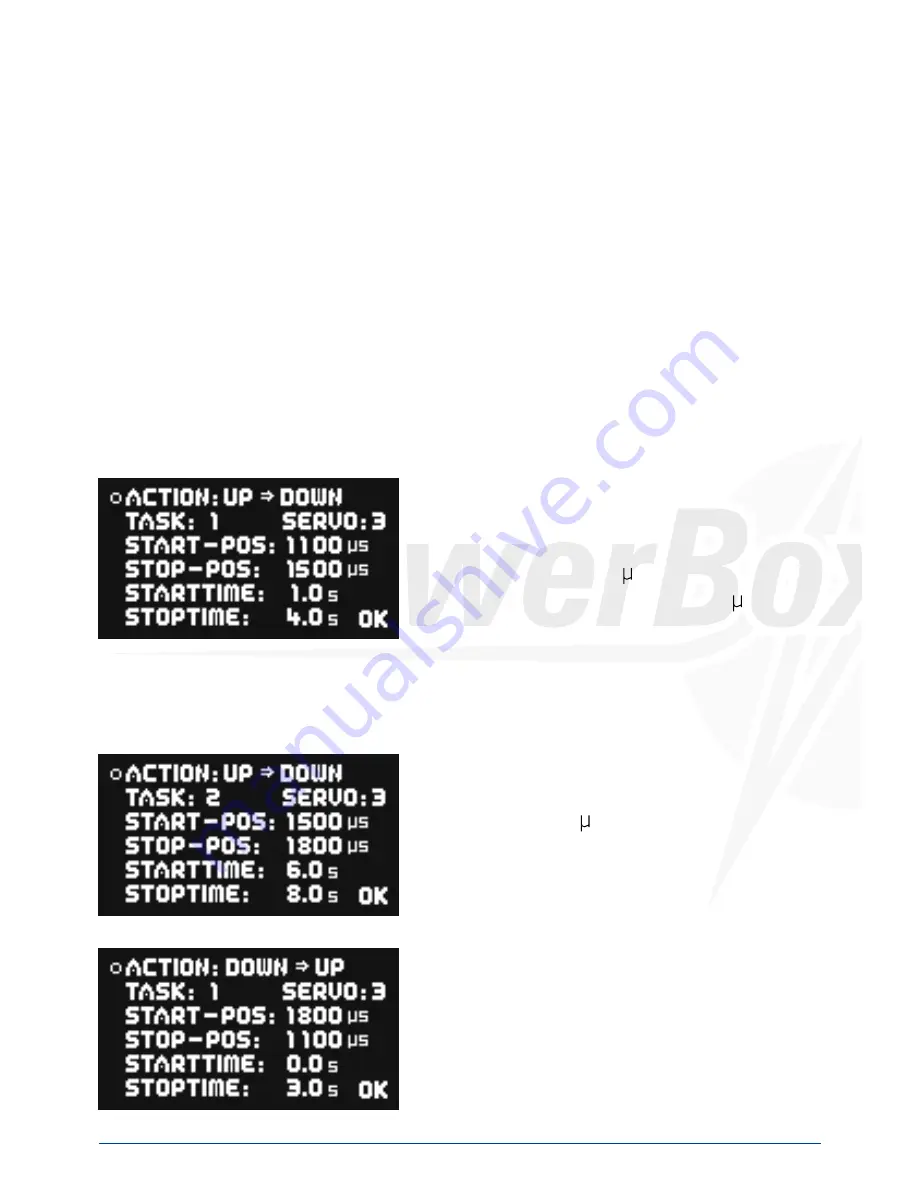
UP » DOWN
means undercarriage exten-
sion. Output 3 of the door sequencer has
been selected. The servo runs from its
initial value of 1100
µ
s (right servo end-
point) to the stop value of 1500
µ
s (servo
centre).
The servo only starts moving 1.0 seconds
after the switch is operated, and the period is 3.0 seconds (4.0 s – 1.0 s).
Task 1 has now completed its course.
After a pause lasting 2.0 seconds at servo
centre, the servo starts moving in the di-
rection of 1800
µ
s (left servo end-point).
The movement period is 2.0 seconds (8.0
s – 6.0 s).
Task 2 has completed its course.
DOWN » UP
means undercarriage retrac-
tion. In this example, when the switch is
operated, the servo immediately starts
running slowly from the left to the right
servo end-point (Start time 0.0 s).