





























No. SX-DSV02472 -
30-
4-2 Position control
Control the position based on the positional command of EtherCAT communication object from the host controller.
Below describes the basic settings necessary for position control.
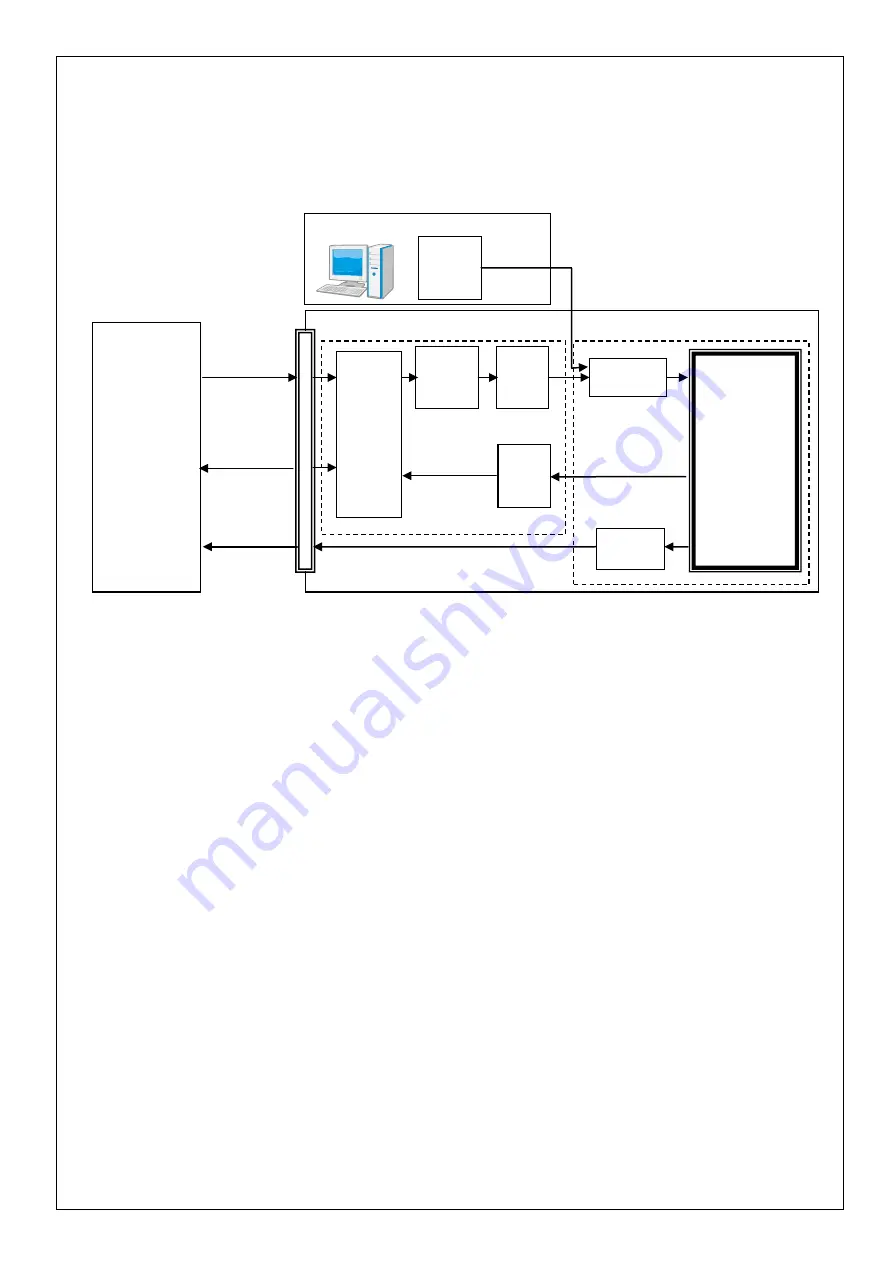
4-2-1 Process of command pulse input
Positional command is input based on the EtherCAT communication object.
As position control modes, Profile position control (PP), Cyclic position control (csp), Interpolated position(ip), and
Homing(hm) are available.
For details, refer to Technical Reference, SX-DSV02473”Section 6-6”, EtherCAT communication specification.
Servo driver
Position command
(EtherCAT
communication)
Position
command
generation &
process
section
EtherCAT
communication
processing
section
Host
controller
Positional
command
filtering function
Position
control section
INP/INP2
(External output signal)
INP/INP2
output function
Electronic
gear &
Polarity
conversion
Electronic
gear &
Polarity
(reverse)
conversion
Feedback position
(EtherCAT
communication)
CoE(CiA402) Processing unit
Motor control
Processing
unit
PANATERM
Position
command
generation &
process
section
R1.05
Motor Business Division, Appliances Company, Panasonic Corporation







































































