





























Drive profile
48
3 E
therC
3-2
Operation modes
The driver supports the operation modes listed below.
•
Cyclic synchronous position mode (CSP)
•
Profile position mode (PP)
•
Cyclic synchronous velocity mode (CSV)
•
Profile velocity mode (PV)
•
Homing mode (HM)
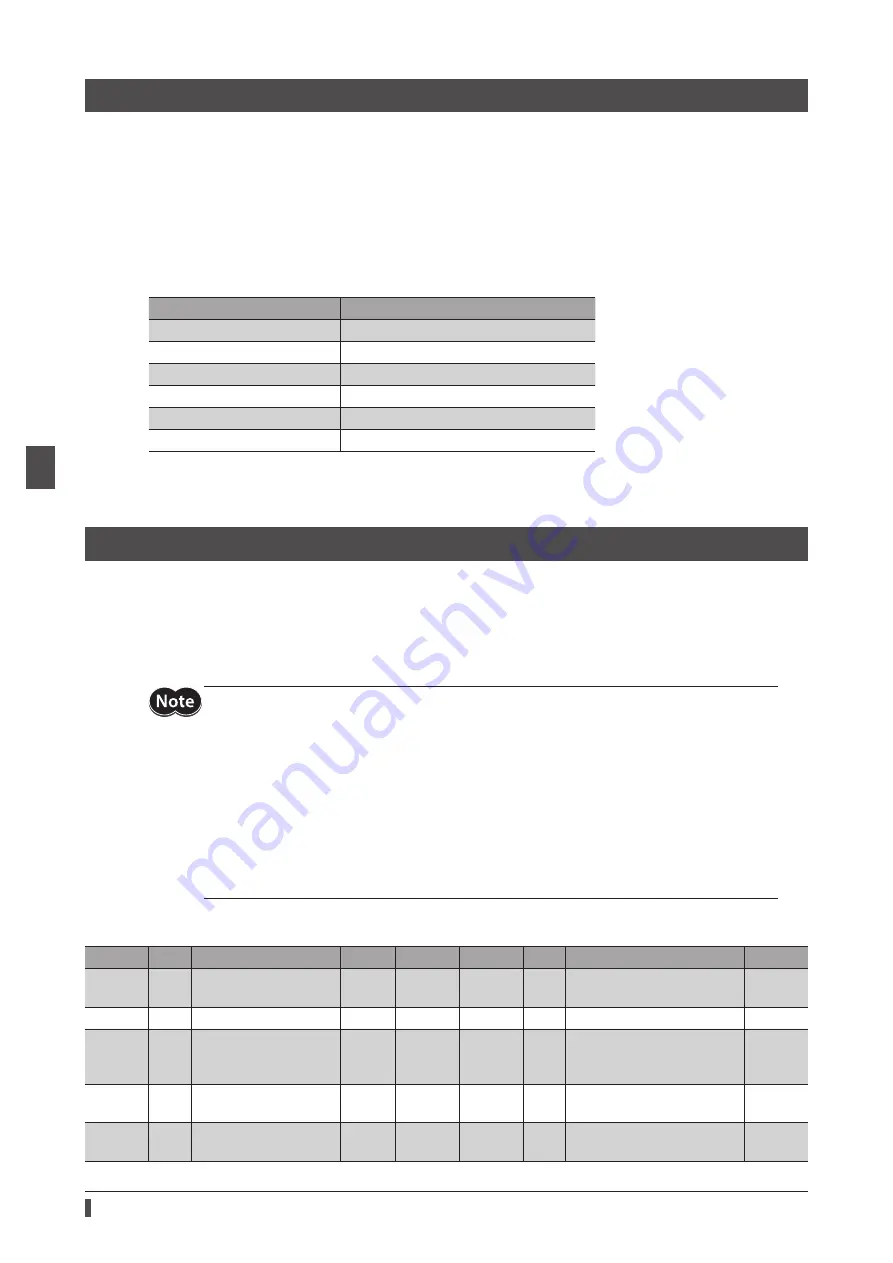
Switching of operation mode
The operation mode can be switched by the Modes of operation (6060h).
Setting value of operation mode
Operation mode
0 (Initial value)
Operation function disable
1
Profile position mode (PP)
3
Profile velocity mode (PV)
6
Homing mode (HM)
8
Cyclic synchronous position mode (CSP)
9
Cyclic synchronous velocity mode (CSV)
Switch the operation mode while operation is stopped. When it was switched during operation, the new operation
mode will be enabled after the operation is stopped.
The operation mode which is enabled can be checked in the Modes of operation display (6061h).
3-3
Cyclic synchronous position mode (CSP)
In the Cyclic synchronous position mode, a path generation (profile generation) is performed by the EtherCAT master.
By cyclic synchronous communication, when the Target position (607Ah) is sent from the EtherCAT master to the
driver, the driver performs position controls.
Use the Cyclic synchronous position mode when EtherCAT communication is performed in the DC mode. If the Cyclic
synchronous position mode is used in the Free Run mode or Sync manager 2 event synchronization mode, the speed
fluctuation or vibration may increase.
•
Since the position is managed by the EtherCAT master in the Cyclic synchronous position mode, if
the operation is stopped without the EtherCAT master, the position deviation may cause. When
inputting the stop signal such as the STOP input or the FREE input or when executing the power
removal function, be sure to perform the following operations to clear the position deviation. If the
stop signal is turned OFF while the position deviation is remained or if the ETO-CLR input is turned
ON after the power removal status is released, the motor may start rotating suddenly.
· Execute the operation stop from the EtherCAT master.
· Clear the position deviation between the EtherCAT master and the driver.
•
Since the position is managed by the EtherCAT master in the Cyclic synchronous position mode,
executing the position preset (P-PRESET) in the driver while the motor is excited may cause the
motor to start suddenly or an alarm of Command pulse error to generate. Put the motor into a
non-excitation state before executing the position preset (P-PRESET) in the driver.
Related objects
Index
Sub
Name
Type
Access
PDO
Save
Range
Update
6040h
00h
Controlword
U16
RW
RxPDO
−
0000h to FFFFh
(Initial value: 0000h)
A
6041h
00h
Statusword
U16
RO
TxPDO
−
−
−
6060h
00h
Modes of operation
INT8
RW
RxPDO
0 (Initial value), 1, 3, 6, 8, 9
(
_
B
6061h
00h
Modes of operation
display
INT8
RO
TxPDO
−
−
−
6062h
00h
Position demand value
[step]
INT32
RO
TxPDO
−
−
−
Summary of Contents for aSTEP AZ mini Driver
Page 14: ...14 1 Introduction...
Page 128: ...128 3 EtherCAT communication...
Page 146: ...146 4 Object list...
Page 164: ...164 5 Troubleshooting...
Page 170: ...170 6 Reference materials...
Page 171: ...171 6 Reference materials...







































































