





























Communications specifications
44
3 E
therC
2-7
Distributed Clocks
The Distributed Clocks (DC) is a method to synchronize operation by sharing the same clock between the EtherCAT
master and the driver.
The interruption signal (SYNC0) is output at a precise interval based on the DC. In the DC mode, an application is
executed in synchronization with SYNC0.
2-8
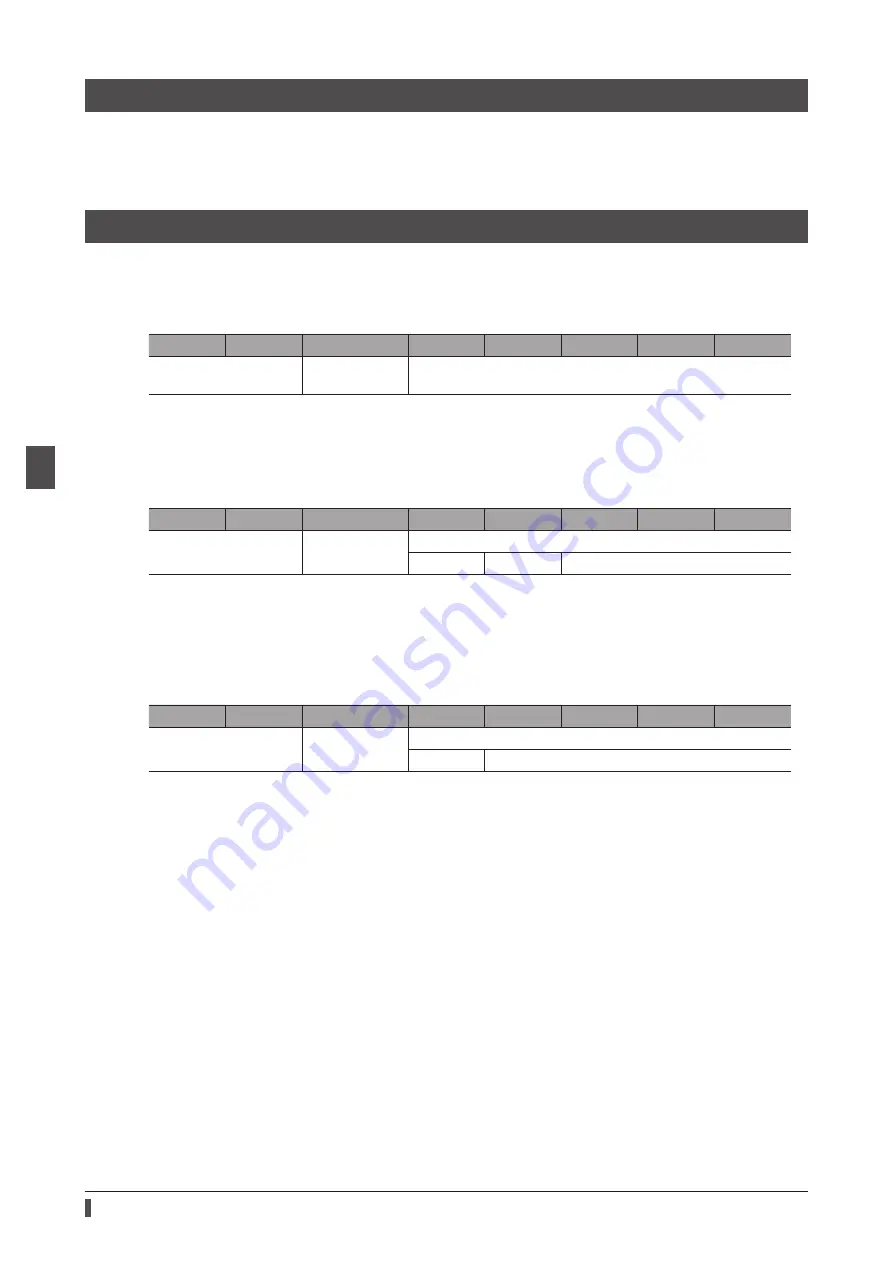
Emergency message
If an error occurs in the driver, an emergency message is sent to the EtherCAT master using the mailbox
communication.
The emergency message is sent only once per error.
The emergency message consists of the following 8 bytes.
Byte0
Byte1
Byte2
Byte3
Byte4
Byte5
Byte6
Byte7
Emergency error code
Error register
object (1001h)
Manufacturer-specific error definition field
Emergency message when an alarm is generated
If an alarm is generated in the driver, an emergency message is sent to the EtherCAT master using the mailbox
communication.
The emergency message when the alarm is generated consists of the following 8 bytes.
Byte0
Byte1
Byte2
Byte3
Byte4
Byte5
Byte6
Byte7
Emergency error code
(FF00h)
Error register
object (1001h)
Manufacturer-specific error definition field
0
Alarm code
0
The emergency error code is FF00h regardless of the alarm contents.
The byte 2 is the same value as the error register object.
The byte 4 is the alarm code. Refer to p.149 for alarm codes.
Emergency code when the ESM transition error is generated
If the transition from Pre-Operational to Safe-Operational was failed in the ESM, the following emergency code is sent.
Byte0
Byte1
Byte2
Byte3
Byte4
Byte5
Byte6
Byte7
Emergency error code
(A000h)
Channel (02h)
Diagnosis data
0Ah
0
If the transition from Pre-Operational to Safe-Operational was requested during the following state, this emergency
code is generated. Check the contents, and reconsider the setting and other conditions.
•
The unsupported communication cycle in the DC mode is set.
•
The object that mapping is not possible is mapped in the PDO mapping.
•
The object for TxPDO is mapped in RxPDO. Or the object for RxPDO is mapped in TxPDO.
Summary of Contents for aSTEP AZ mini Driver
Page 14: ...14 1 Introduction...
Page 128: ...128 3 EtherCAT communication...
Page 146: ...146 4 Object list...
Page 164: ...164 5 Troubleshooting...
Page 170: ...170 6 Reference materials...
Page 171: ...171 6 Reference materials...







































































