66
6.3.1.
Setting Calibration
Follow the procedures below to set a scene for Calibration.
1
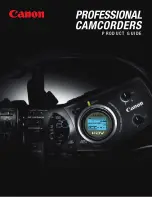
Prepare a calibration target and
mount it to the robot.
The
target
should
have
sufficient strength not to shift
or deform by operations of the
robot.
The target should have a mark
such as pattern or shape, which
the
Shape
Search
III
processing unit can detect.
Adjust the Z
-
axis direction so
that the imaging surface of a
workpiece for Grip Correction
and the target are the same
height.
2
Click [Scene switch] on the
Main Window of the Vision
Sensor.
Select the target scene,
126 Calibration and Grip
correction_xx_xxx
Click [OK] to switch scenes.
Calibration target
The target mark is
on back side.
Adjusting the height as
same as that of the
imaging surface.