





























Enhanced Time Processing Unit (eTPU2)
MPC5644A Microcontroller Reference Manual, Rev. 6
964
Freescale Semiconductor
— break on higher-byte write data value, lower 24-bit write value, full word (32-bit) write value,
or regardless of data. Break on read data is not supported.
•
PC (program counter) value.
•
Beginning of a thread with a Host Service Request pending.
•
Beginning of a thread with a Link Service Request pending.
•
Beginning of a thread with a Match Service Request pending.
•
Beginning of a thread with a Transition Service Request pending.
•
End of a thread.
•
Illegal instruction execution.
All these conditions can also be qualified by the value of the CHAN register.
On any of these conditions, halt of one microengine does not depend on the halt of the other, unless the
other engine is configured to do so, via Nexus Interface. Occurrence of any of these conditions halts the
microengine, i.e., the conditions are logically “ORed” together, and they can be individually enabled.
While in halt state, the microengine can also execute any forced microinstruction not in the normal
program flow (see
Section 24.5.10.2.7, Forced microinstruction execution
) or, if in halt_exec, in
single-step (see
Section 24.5.10.2.6, Single-step execution
There are situations when requests for stopping an engine, breakpoint and service can occur
simultaneously. Breakpoint requests always prevails over a stop request (ETPU_ECR bit MDIS = 1 or
device debug request = 1). When the eTPU is idle: stop request prevails over Service Request if there is
not a hardware breakpoint request; a hardware breakpoint request leads to debug mode immediately if
there is no Service Request, and after TST if there is Service Request (regardless of stop requests). The
rules above are summarized in the
, showing the destination state of the microengine in each
situation.
When a thread is ending, it goes to Idle or TST only if there is neither a hardware breakpoint request (signal
ndedi_thread_break negated) nor a request to stop (MDIS = 1 or device debug request = 1). When thread
is ending and there are simultaneous hardware breakpoint (ndedi_thread_break active) and stop
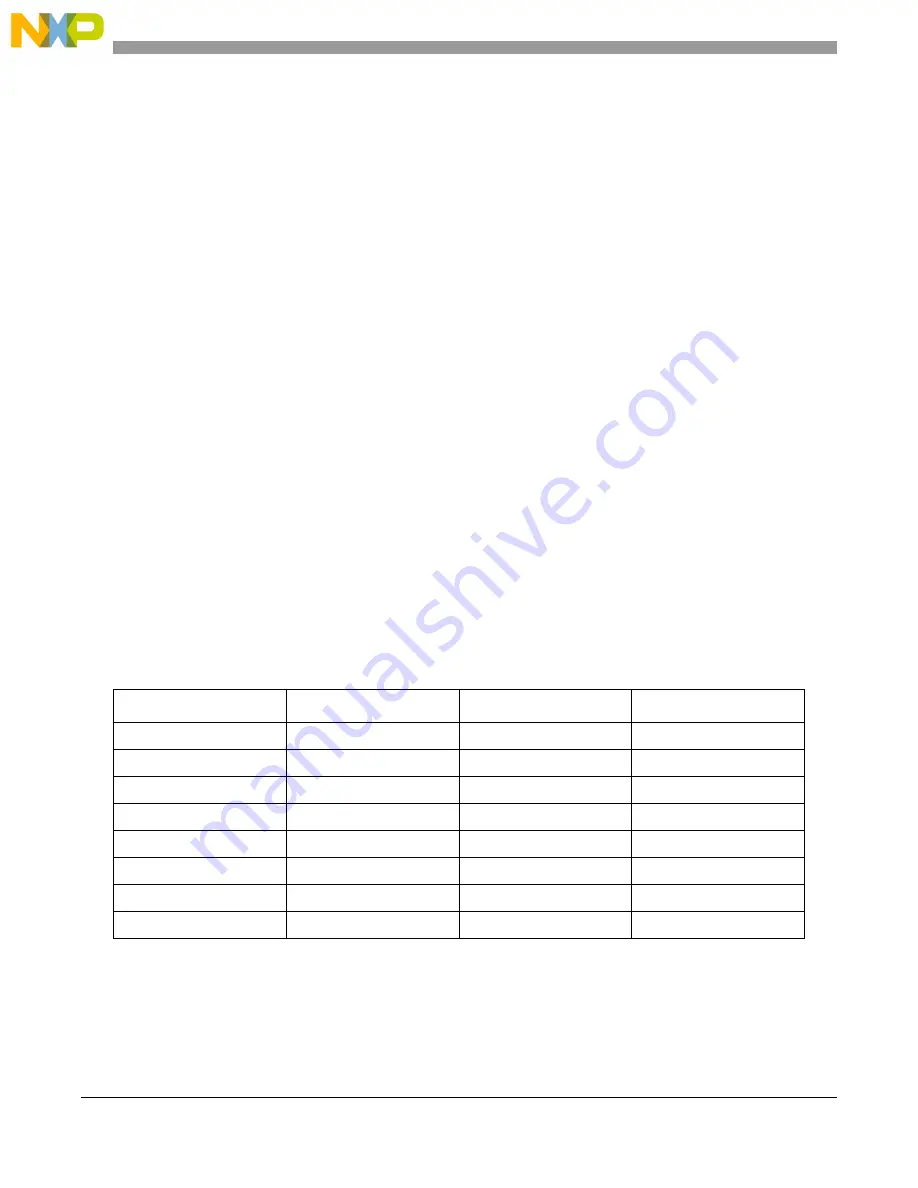
Table 24-119. Breakpoint, stop and service requests resolution from idle
Breakpoint request
MDIS
Service request
Final state
no
0
0
Idle
no
1
0
Stop
no
0
1
TST
no
1
1
Stop
Yes
0
0
Halt_idle
Yes
1
0
Halt_idle
Yes
0
1
TST
1
1
Breaks after TST, if signal ndedi_sync_break is still asserted.
Yes
1
1
TST
Summary of Contents for MPC5644A
Page 2: ...MPC5644A Microcontroller Reference Manual Rev 6 2 Freescale Semiconductor...
Page 24: ...MPC5644A Microcontroller Reference Manual Rev 6 24 Freescale Semiconductor...
Page 26: ...MPC5644A Microcontroller Reference Manual Rev 6 26 Freescale Semiconductor...
Page 52: ...Introduction MPC5644A Microcontroller Reference Manual Rev 6 52 Freescale Semiconductor...
Page 56: ...Memory Map MPC5644A Microcontroller Reference Manual Rev 6 56 Freescale Semiconductor...
Page 1228: ...Decimation Filter MPC5644A Microcontroller Reference Manual Rev 6 1228 Freescale Semiconductor...
Page 1440: ...FlexCAN Module MPC5644A Microcontroller Reference Manual Rev 6 1440 Freescale Semiconductor...