





















CHAPTER 1. OMNI DRIVE MODULE
1.5. CONFIGURATION
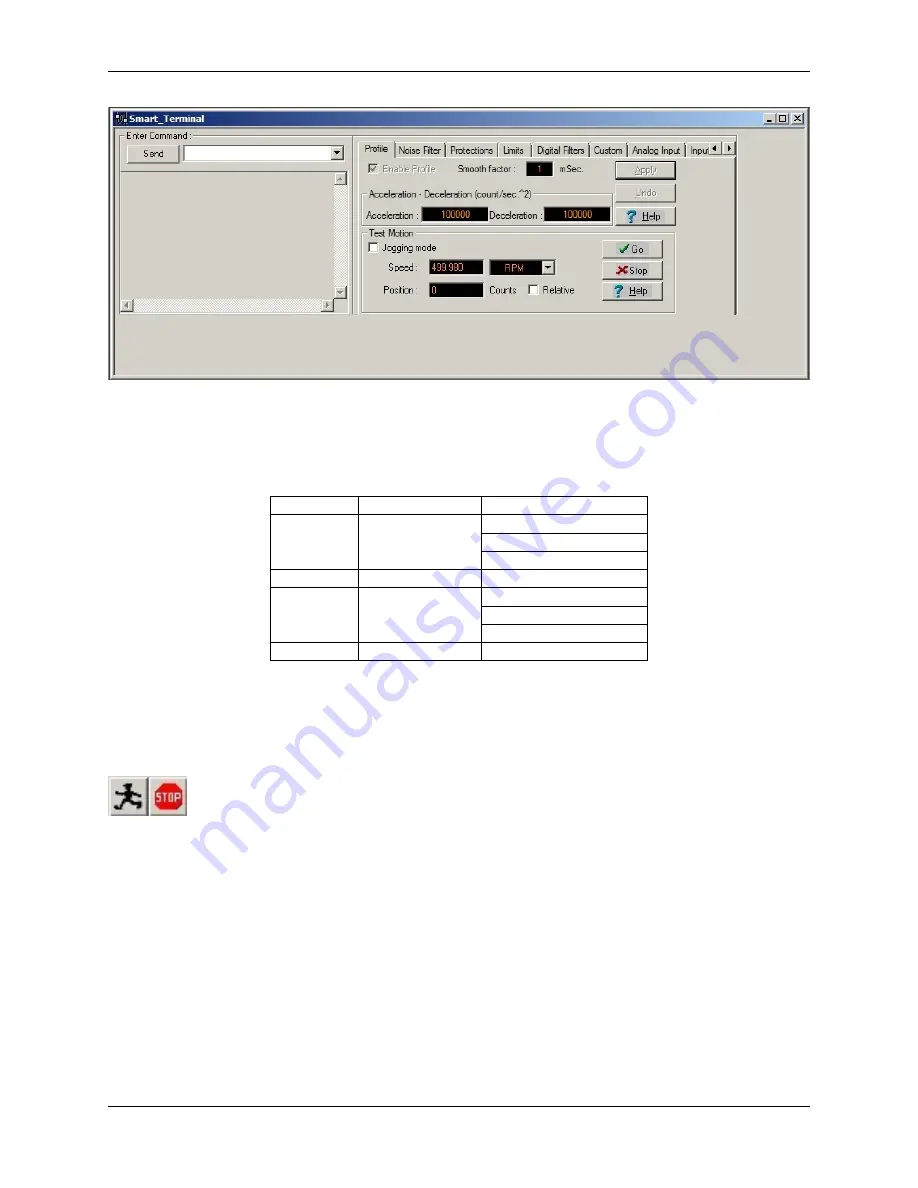
The communication settings can be changed by entering the command “PP” plus an index number in square brackets
in the command line at the top left of the
Smart Terminal
. Enter the command and either hit enter or click the
Send
button to read the current value. Add the equals sign and the new value right after the command to change a setting.
The following commands may be necessary:
Command
Description
Common values
PP[2]
RS-232 baud rate
4: 57600 Baud (Default)
3: 38400 Baud
2: 19000 Baud
PP[13]
CAN ID
1-8
PP[14]
CAN baud rate
0: 1000 kBaud (Default)
1: 500 kBaud
2: 250 kBaud
PP[15]
CAN group ID
1 – 128 (Default: 30)
1.5.3 Advanced Settings
The motor must be deactivated for some settings to be applied. Use the button Stop & Motor Off to deactivate the
motor.
1.5.3.1 Acceleration and Deceleration
The maximum permitted acceleration and deceleration can be set by editing the two according fields in the tab
Profile
of the Smart Terminal and clicking
Apply
. These values are the limiting values and will be used by the internal control
loop of the amplifier. The actual acceleration and deceleration in normal operation is mainly determined by your
motion control software and will be (and should be) significantly lower.
1.5.3.2 Speed Limits and Stop Deceleration
Several speed limits can be set on the tab
Limits
, sub tab
Velocity
. The Command limits define the velocity range that
will be accepted by the amplifier. Motion commands with velocities exceeding this range will be rejected.
18