





























34
MN002000A © 2004 Navman NZ Ltd. All rights reserved. Proprietary information and specifications subject to change without notice.
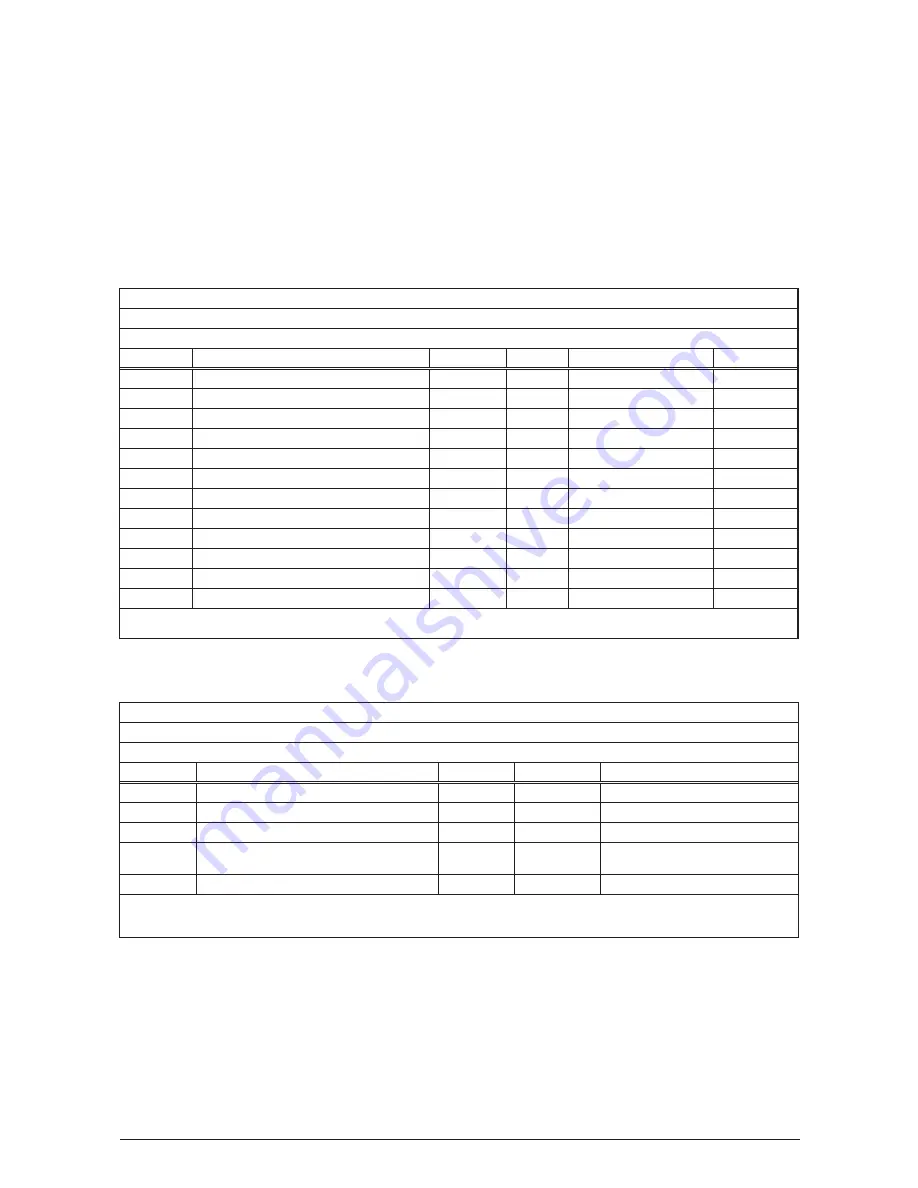
Message ID: 1210
Rate: as required (maximum rate is 1 Hz)
Message length: 20 words
Word No.
Name
Type
Units
Range
Resolution
1-4
Message header
5
Header checksum
6
Sequence number (Note 1)
I
0 to 32 767
7
User datum ID
UI
300-304
8-9
Semi-major axis - integer part
UDI
m
6 300 000 to 6 400 000
10
Semi-major axis - fractional part
UI
m
0 to 9999
10
-4
11
Inverse flattening -integer part
UI
280 to 320
12-13
Inverse flattening - fractional Part
UDI
0 to 999 999 999
10
-9
14-15
WGS-84 datum offset - dX
DI
m
0 to ±9 000 000
10
-2
16-17
WGS-84 datum offset - dY
DI
m
0 to ±9 000 000
10
-2
18-19
WGS-84 datum offset - dZ
DI
m
0 to ±9 000 000
10
-2
20
Data checksum
Note 1: The sequence number is a count that indicates whether the data in a particular binary message has been updated or
changed since the last message input.
Table 3-24 Message 1210 (user-defined datum)
Message ID: 1211
Rate: as required (maximum rate 1 Hz)
Message length: 8 words
Word No.
Name
Type
Units
Range
1-4
Message header
5
Header checksum
6
Sequence number (Note 1)
I
0 to 32767
7
Datum ID (Note 2)
UI
0 to 188 and
300 to 304
8
Data checksum
Note 1: The sequence number is a count that indicates whether the data in a particular binary message has been updated or
changed since the last message input.
Note 2: Appendix B contains map datum codes from 0 to 188. Codes 300 to 304 are user-defined.
Table 3-25 Message 1211 (map datum select)
3.5.2.2 Message 1210 (user-defined datum)
This message allows the user to define a datum
to be used by the receiver to transform its position
solution. Up to five user-defined datums may be
stored. Storage of these parameters requires
EEPROM. The contents of the ‘user-defined
datum’ message are described in Table 3-24.
Note that datum definition does not imply datum
use. Message 1211 is used to specify the ‘datum in
use’ for the navigation function. Also, any message
1210 that contains an undefined datum code is
ignored.
3.5.2.3 Message 1211 (map datum select).
This message allows the user to select a datum
to be used by the receiver to transform its position
solution. The contents of the ‘map datum select’
message are described in Table 3-25.







































































