





























moog
MSD Servo Drive DC-AC Operation Manual
66
Id.-No.: CA97554-001 Date: 06/2012
A.7.6 Selection of suitable AC-AC servo drive as supply
If the simultaneity factor in the axis network is low, it may be possible to select the
largest axis as the AC-AC servo drive and handle the feed for the entire axis network.
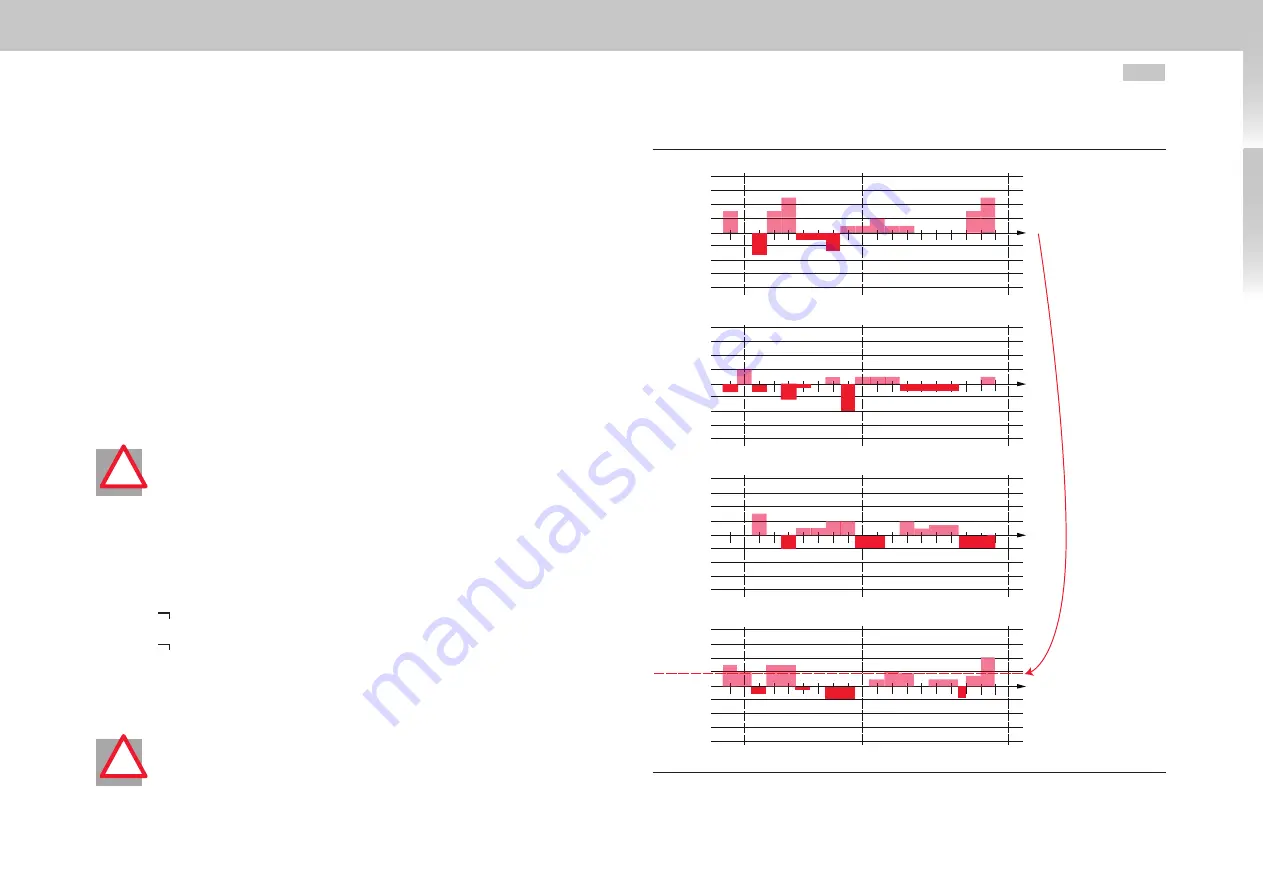
To determine the suitable AC-AC servo drive, a power/time graph over a complete load
cycle must be available for all axes. Figure A.4 presents an example of one.
The power demand of each individual axis (including the AC-AC servo drive axis) at every
point in time is added together to produce the total power/time graph. The following
characteristic values can be derived from it:
•
Nominal input power of the AC-AC servo drive axis
•
Maximum input power of the AC-AC servo drive axis
•
Nominal regenerative power
•
Maximum regenerative power
Feedback into the supply grid is then not possible however. Regenerative power must be
discharged by way of a braking resistor and converted into heat.
ATTENTION!
Dimensioning of braking resistor
The braking resistor of the AC-AC servo drive should be dimensioned such
that the total regenerative power of the multi-axis system can be dissipated.
DC link power and total DC link capacitance of AC-AC servo drive
To gain an initial estimate as to whether a AC-AC servo drive is adequate to supply ad-
ditional DC-AC servo drives, the power made available by the DC link of the AC-AC servo
drive can be approximated using the following formulas:
P
rated
=
3 . U
mains
. I
rated (f
SW
and U
mains
)
. 0.8
P
Max
= 3 . U . I
Max (f
SW
and U
mains
)
0.8
.
mains
√
√
In this, I
rated (fsw and U_mains)
is the rated current and I
MAX (fsw and U_mains)
the maximum current of
the servo drive according to the switching frequency of the power stage and the mains
voltage.
ATTENTION!
Do not exceed the maximum power
The power values are quadratic means over a load cycle. The maximum
power must not be exceeded at any time, and may only be tapped for the
specified time, otherwise the AC-AC servo drive will be destroyed.
!
!
[ P
1
]
[ P
2
]
[ P
3
]
P
res 1...3
1
0
0
0
0
0
2
3
4
5
6
7
8
9
t [s]
1
0
2
3
4
5
6
7
8
9
t [s]
[ P
res
]
Axis 1
(AC supply
axis)
-
Resultant total power for AC supply axis
Axis 2
Axis 3
Fig. A.4 Time/power graph with AC-AC servo drive as supply







































































