





























01/02 AWB8230-1413GB
Start/stop
87
Change over current limit (OLR)
The frequency inverter monitors the motor current during
acceleration and/or static operation. When the inverter reaches
the overload limit, the output frequency is reduced to limit the
load. This prevents a shutdown due to overcurrent caused by an
excessive moment of inertia or sudden changes in the load torque.
You can define two different overload behaviours:
• PNU b021 to b023 or
• PNU b024 to b026.
By default, the values of PNU b021 to b023 are used. To use
PNU b024 to b026, activate the digital input configured as OLR
(change over current limit) (
a
fig. 78 and table 17).
Under PNU b021/b024, you can define the overload limit.
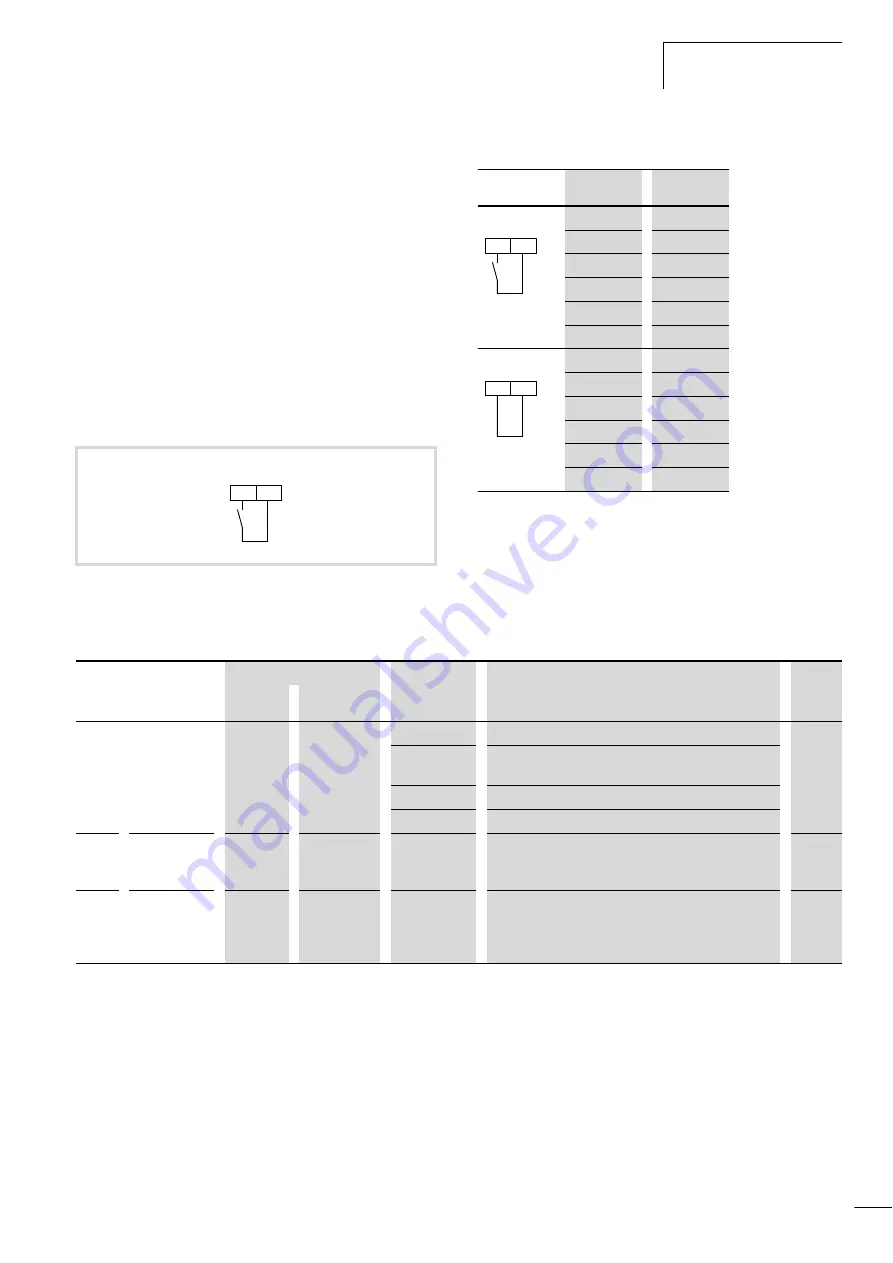
Table 17:
Changing over the current limit
X
Under PNU b021 to b023, define the overload behaviour for
your first instance.
X
Under PNU b024 to b026, define the overload behaviour for
your second instance.
X
Program one of the digital inputs 1 to 5 as OLR by entering the
value 39 under the corresponding PNU (C001 to C005).
Figure 78:
Digital input 3 configured as OLR
(change over current limit)
OLR
P24
3
OLR
PNU
Active
b021
j
b022
j
b023
j
b024
–
b025
–
b026
–
b021
–
b022
–
b023
–
b024
j
b025
j
b026
j
OLR
P24
3
OLR
P24
3
PNU
Name
Adjustable in RUN mode
Value
Function
WE
Normal
Extended
b021/
b024
Current limit
characteristic
–
j
00
Motor current limit not active
01
01
Motor current limitation active on acceleration and
constant speed
02
Motor current limitation active at constant speed
03
Motor current limit active in all operating states
b022/
b025
Tripping
current
–
j
0.5 to 2.0
x
I
e
Setting range of the tripping current as a multiple of the
frequency inverter rated current, i.e. the range is given in
amperes (A).
1.2
x
I
e
b023/
b026
Time constant
–
j
0.1 to 30.0 s
When the set current limit is reached, the frequency is
reduced to 0 Hz in the time set here.
Caution: If possible, do not enter a value less than 0.3
here!
1.00
efesotomasyon.com - Klockner Moeller - inverter







































































