
























6 SERVO MOTOR DRIVING
6.1 Homing mode (hm)
69
6
The current control status can be checked.
The following table lists the bits of this object that relate to the home position return operation.
■
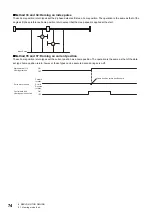
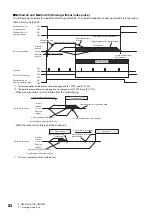
Bit 10 (Target reached) of Statusword (6041h)
Bit 10 turns on (1) when the command position is reached. If bit 8 (Halt) of Controlword (6040h) is set to "1", bit 10 turns on (1)
when a deceleration stop is completed.
If a command is input again, bit 10 turns off (0).
■
Bit 12 (Homing attained) of Statusword (6041h)
Bit 12 turns off (0) when a home position return operation is started and turns on (1) when the operation is completed. For
absolute position detection system, bit 12 turns on (1) after the power supply is turned on.
■
Bit 13 (Homing error) of Statusword (6041h)
Bit 13 turns on (1) when an alarm or warning ([AL 90.2], [AL 90.3], [AL 90.5], [AL 96.1], [AL 96.2], or [AL 96.3]) occurs during
a home position return operation.
The following shows the definition of Bit 10, Bit 12, and Bit 13 of Statusword (6041h) in the hm mode.
Bit
Description
0 to 9
10
Target reached
Refer to the following and the table below for the description.
Page 69 Bit 10 (Target reached) of Statusword (6041h)
11
12
Homing attained
Refer to the following and the table below for the description.
Page 69 Bit 12 (Homing attained) of Statusword (6041h)
13
Homing error
Refer to the following and the table below for the description.
Page 69 Bit 13 (Homing error) of Statusword (6041h)
14 to 15
Bit 13
Bit 12
Bit 10
Definition
0
0
0
Homing procedure is in progress
0
0
1
Homing procedure is interrupted or not started
0
1
0
Homing is attained, but target is not reached
0
1
1
Homing procedure is completed successfully
1
0
0
Homing error occurred, velocity is not 0
1
0
1
Homing error occurred, velocity is 0
1
1
reserved







































































