





























398
12 DATA USED FOR POSITIONING CONTROL
12.3 Basic Setting
[Pr.21] Current feed value during speed control
Specify whether to enable or disable the update of [Md.20] Current feed value while operations are performed under the
speed control (including the speed control of speed-position switching control and position-speed switching control).
• When the speed control is performed over two to four axes, the selection between enabling and disabling the update of
[Md.20] Current feed value depends on how the reference axis is set.
• Set 1: Current feed value is updated to perform the speed-position switching control (ABS mode).
■
Buffer memory address
The following table shows the buffer memory address of this area.
■
Default value
The default value is 0: Current feed value is not updated for all the axes.
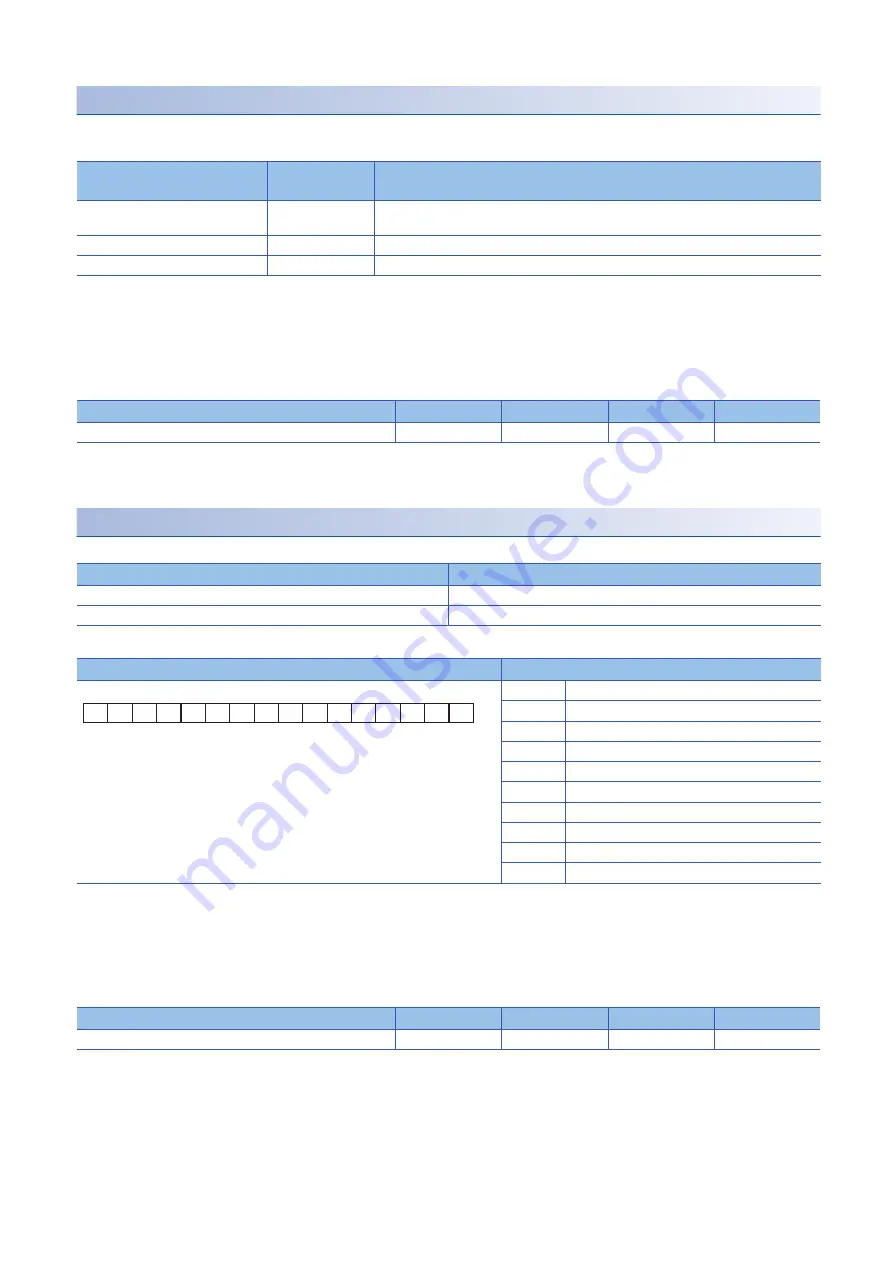
[Pr.22] Input signal logic selection
Set the logic of each input signal according to the external device.
The following table shows the assignment of each input signal. Set a value for the target bit.
• A mismatch in the signal logic will disable normal operation. Be careful of this when the setting is changed from the initial
value.
• Set the logic selection (b8) of the manual pulse generator input for the axis 1. (Setting for any of the axis 2 to 4 is invalid.)
■
Buffer memory address
The following table shows the buffer memory address of this area.
■
Default value
Each input signal of all the axes is set to 0: Negative logic.
Current feed value during
speed control
Setting value
Description
Current feed value is not updated
0
The current feed value does not change. (The current feed value during speed control start is
maintained.)
Current feed value is updated
1
The current feed value is updated. (The current feed value changes from the initial value.)
Current feed value is cleared to zero
2
The current feed is set to 0 and does not change from 0 while the speed control is performed.
Buffer memory name
Axis 1
Axis 2
Axis 3
Axis 4
[Pr.21] Current feed value during speed control
30
180
330
480
Input signal logic selection
Setting value
Negative logic
0
Positive logic
1
Buffer memory
Assignment of input signals
b0
Lower limit signal
b1
Upper limit signal
b2
Drive unit READY signal
b3
Stop signal
b4
External command signal
b5
Zero signal
b6
Near-point dog signal
b7
Use prohibited (fixed to 0)
b8
Manual pulse generator input
b9 to b15
Use prohibited (fixed to 0)
Buffer memory name
Axis 1
Axis 2
Axis 3
Axis 4
[Pr.22] Input signal logic selection
31
181
331
481
b15 b14 b13 b12 b11 b10
b9
b8
b7
b6
b5
b0
b1
b2
b3
b4
0
0
0
0
0
0
0
0
Summary of Contents for MELSEC iQ-R RD75P4
Page 1: ...MELSEC iQ R Positioning Module User s Manual Application RD75P2 RD75P4 RD75D2 RD75D4 ...
Page 2: ......
Page 13: ...11 MEMO ...
Page 19: ...17 CONTENTS INDEX 588 REVISIONS 592 WARRANTY 593 TRADEMARKS 594 ...
Page 498: ...496 13 PROGRAMMING 13 2 List of Labels Used ...
Page 503: ...13 PROGRAMMING 13 4 Program Example 501 13 ...
Page 514: ...512 13 PROGRAMMING 13 4 Program Example Restart program Parameter data initialization program ...
Page 515: ...13 PROGRAMMING 13 4 Program Example 513 13 Flash ROM write program Error reset program ...
Page 516: ...514 13 PROGRAMMING 13 4 Program Example Stop program ...
Page 565: ...APPENDICES Appendix 4 Operation Examples of When the Remote Head Module Is Mounted 563 A ...
Page 597: ......







































































