





























190
Communication operation and setting
4.17.4 Communication EEPROM write selection (Pr. 342)
When changing the parameter values frequently, set "1" in
Pr. 342
to write them to the RAM only.
The life of the EEPROM will be shorter if parameter write is performed frequently with the setting unchanged from "0 (initial
value)" (EEPROM write).
When parameter write is performed from RS-485 communication with the drive unit PU connector, parameters storage
device can be changed from RAM to RAM only. Set when a frequent parameter change is necessary.
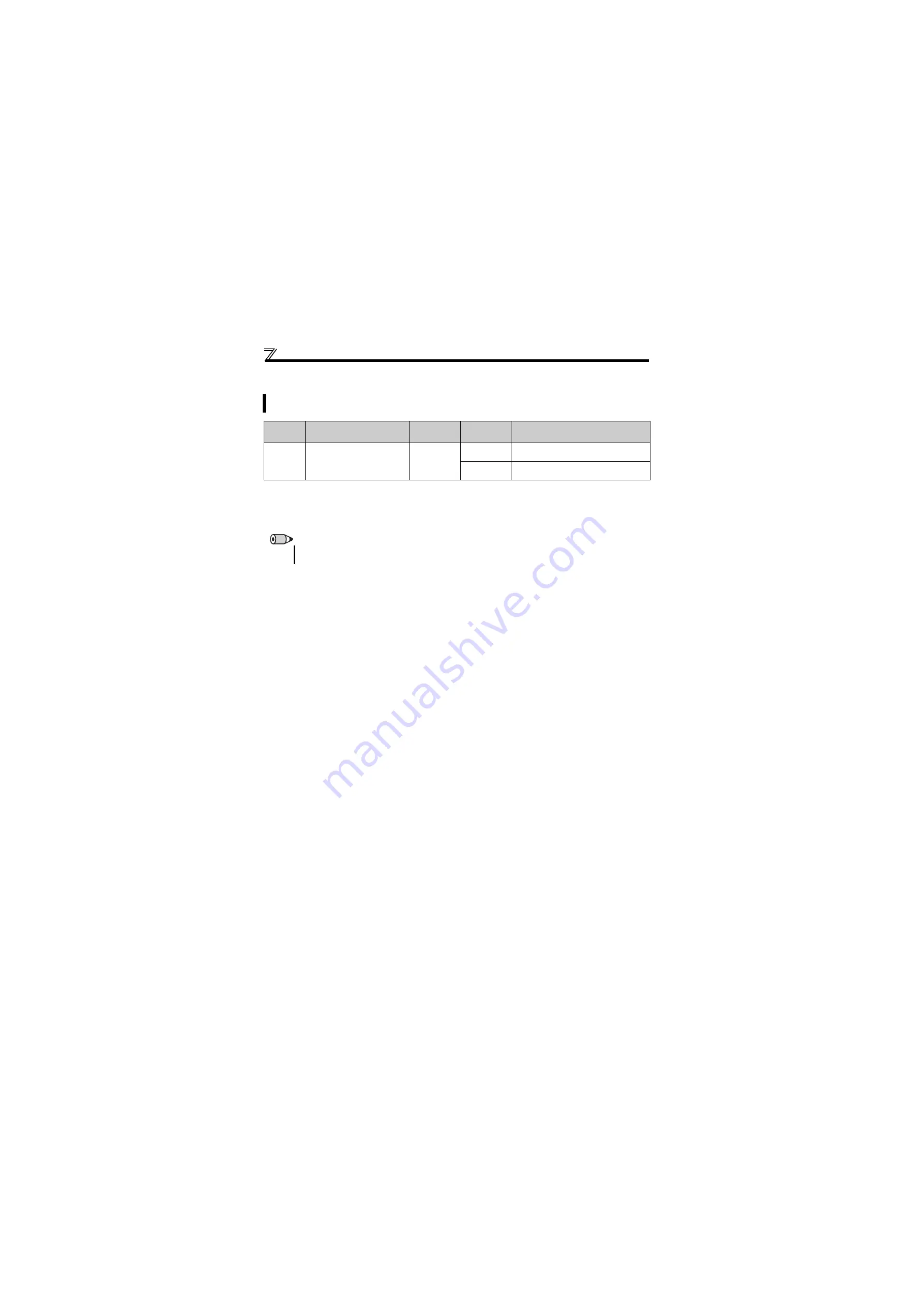
Parameter
Number
Name
Initial Value
Setting Range
Description
342
Communication EEPROM
write selection
0
0
Parameter values written by communication are
written to the EEPROM and RAM.
1
Parameter values written by communication are
written to RAM.
The above parameter can be set when
Pr. 160 Extended function display selection
= "0".
REMARKS
When "1" (write to RAM only) is set in
Pr. 342
, powering OFF the drive unit will erase the changed parameter values. Therefore,
the parameter values available when power is switched ON again are the values stored in EEPROM previously.
Summary of Contents for FR-D720-0.2K-G
Page 45: ...34 MEMO ...
Page 293: ...290 MEMO ...







































































