





























8-92
8-92
8.18. Offline/Online/Simulation
The project statuses are offline, online, and simulation. The meaning of each status and the contents displayed in
the project tree are shown below.
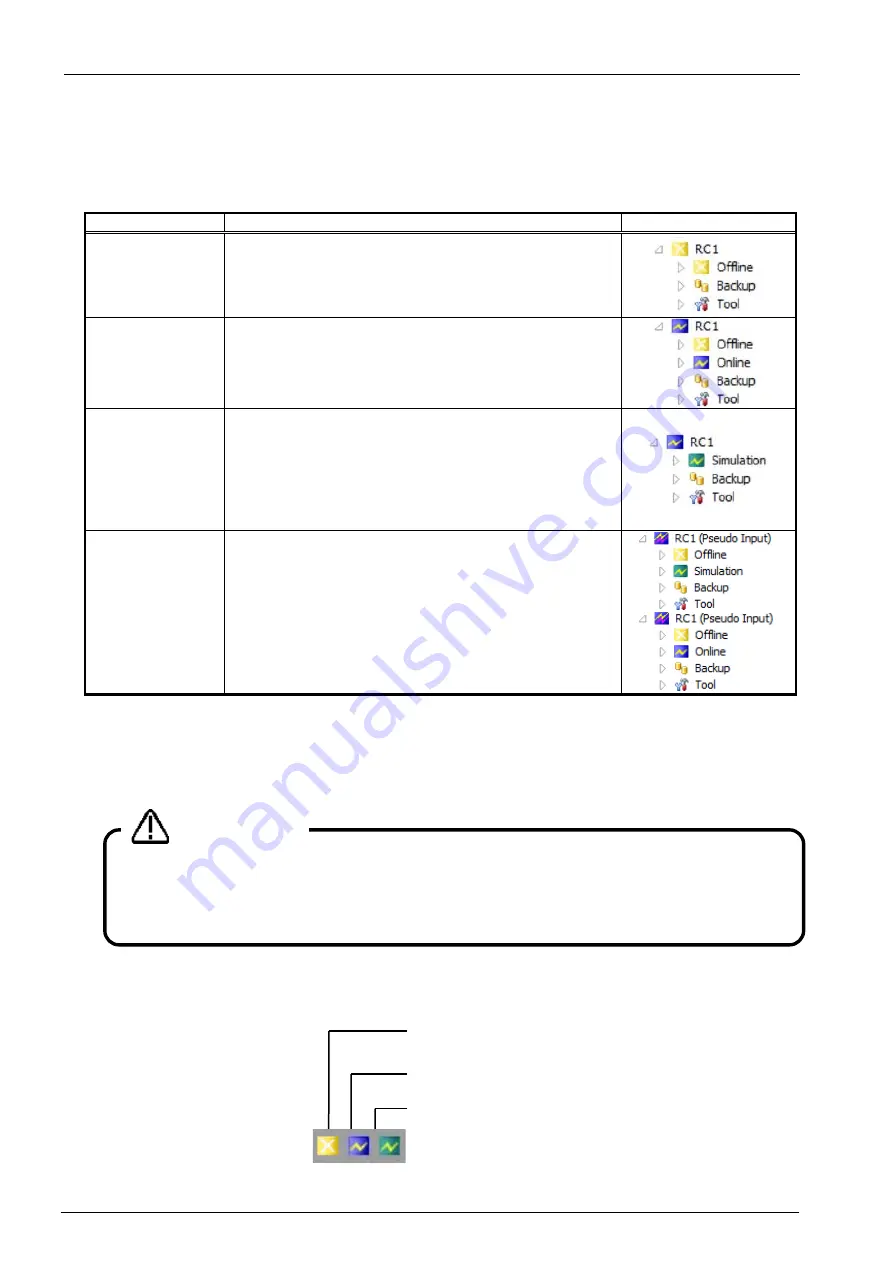
Table 8-2 RT ToolBox3 Status
Status
Explanation
Project tree display
Offline
Targets files stored on the computer.
In the offline mode, the icon displayed at left of the project
name in the project tree is green, and Offline, Backup and
Tool are displayed in the project tree.
Online
The robot is connected to the robot controller and you can
check and change the information in the controller
In the online mode, the icon displayed at left of the project
name in the project tree is blue, and Online, Offline,
Backup and Tool are displayed in the project tree.
Simulation
* This is available
on the standard
and Pro editions.
This targets a virtual robot controller running on the
computer and you can check and change the information
in the virtual controller
In the simulation mode, the icon displayed at left of the
project name in the project tree is blue, and Offline (*1),
Simulation, Backup and Tool are displayed in the project
tree.
Pseudo input
Signals is input from the personal computer to the robot
controller, not from external equipment. During pseudo
input mode, the robot controller does not accept signal
input from external equipment.
Please refer to
(*1) This is displayed only when the virtual robot controller of the CR800-R/CR800-Q/CR750-Q/CRnQ-700
series is displayed. With the above series, offline SQ direct files can be edited even during a simulation.
When this software starts, it goes to "Offline" status.
You can change a workspace or a project only in the "Offline" status.
You can switch between the offline, online and simulation modes by either the icons on the title bar or by the "Home"
or "Online" tabs on the ribbon. With the tool bar, you can switch as follows.
Figure 8-29 Explanation of Tool Bar
Switch to "Offline".
Switch to "Online".
Switch to "Simulation".
Simulation functions are supported only on the RT ToolBox3 standard and pro editions. It cannot be
used in the mini edition.
Also, note that simulation functions cannot be used when Movemaster commands are selected on the
standard or pro editions.
Caution
Summary of Contents for 3F-14C-WINE
Page 84: ...8 84 8 84 Figure 8 21 Parameter transfer procedure 1 2 2 ...
Page 393: ...18 393 18 393 Figure 18 1 Starting the Oscillograph ...
Page 413: ...18 413 18 413 Figure 18 24 Output to Robot program Selection ...
Page 464: ...18 464 18 464 Figure 18 72 Starting the Tool automatic calculation ...
Page 545: ...21 545 21 545 Figure 21 55 Hide display of user mechanism ...
Page 624: ...24 624 24 624 Figure 24 4 Document output example ...







































































